技術紹介
分割鏡交換ロボットの「目と手」が、
宇宙で最初に生まれた星
「ファーストスター」を捉える観測に貢献。

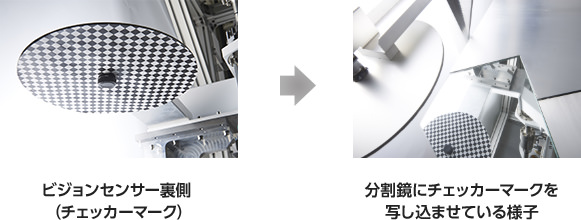
センサーの「目」で鏡とロボットの位置を認識する「ビジョンセンサー」。
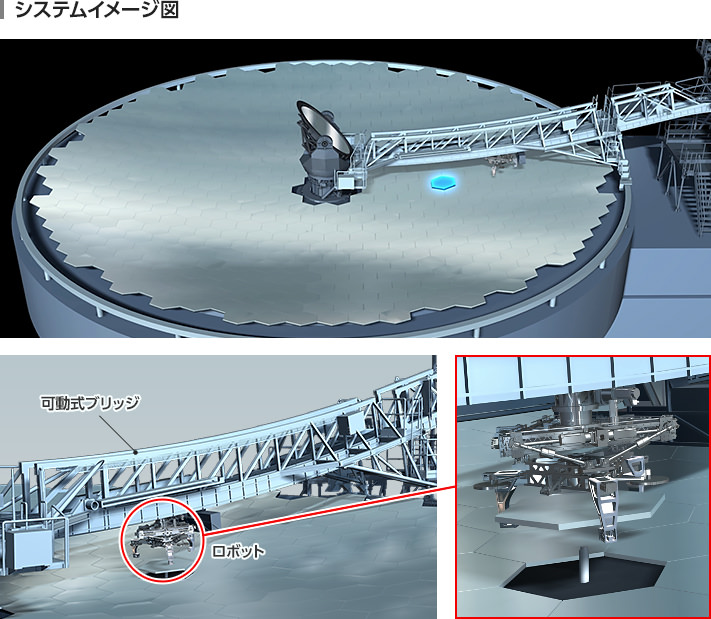
鏡交換作業を行う際、ロボットは可動式ブリッジにより交換する鏡の上へと移動します。交換する鏡は鏡下のジャッキで押し上げられますが、カメラで上から見ただけでは、鏡の反射により鏡の位置を正確に特定するのは困難です。
それを解決するのが「ビジョンセンサー」です。まずチェッカーマークを鏡に投影し、どこに交換する鏡があるかを検出し、鏡とロボットの位置を正確に合わせます。対角1440mmの鏡の位置を3mm以下の高い精度でとらえることができ、人で言えば「目」の役割を果たす技術です。