※発電機事業は2024年4月1日をもって三菱ジェネレーターに事業移管されました。詳しくはこちら。
開発NOTE
冷却溝のある凸凹道でも
少ない揺れで走行できます。

 先端技術総合研究所 水野 大輔
先端技術総合研究所 水野 大輔
点検ロボットが走行する固定子側には冷却溝が多数あり、道路に例えるなら所々に穴が開いた凸凹道です。厚みを20mm以下に抑えるには、車輪を使う場合、直径は当然20mm以下になります。そのような小さな車輪では冷却溝に引っかかってしまい、振動が大きくなります。そのため今回は走行ベルトを用いることにしました。しかし今回の点検ロボットは高密度でさまざまな部品が配置されており、走行ベルトを支える滑車の機構を収める場所がありませんでした。そこで思いついたのが平板でベルトを支える方法です。仮に滑車が使えたとしても、滑車が冷却溝の上を通るたびに振動が発生しますが、平板であればより振動を抑えることもできます。またシンプルな構造なのでコンパクト化・軽量化にも貢献します。
課題は平板でどれぐらいの力で走行ベルトを支えればうまく走るか、ということでした。点検ロボットは磁力によって円柱形の発電機内部を360度、密着して走行します。逆さまになって走ることも、真横になって走ることもあるのです。どんな姿勢でも安定して走るためには磁力の調整など、さまざまな工夫が必要でした。
薄さのなかで、十分な力を出すために突き詰めていきました。
 先端技術総合研究所 森本 貴景
先端技術総合研究所 森本 貴景
タッピング機構を開発するにあたり、まず行ったのはハンマーで実際にウエッジを叩いてみることでした。評価に必要なデータを取るにはどれぐらいの強さで叩けばいいかを知るためです。人なら必要な強さで叩くためにさほど力はいりませんが、この強さを点検ロボットで実現するのは大変だと、その時に実感しました。しかも厚み20mm以下にすべての機構を収めなければならないのです。この薄さのなかで、十分な力を出すために突き詰めていったのが今回のタッピング機構です。
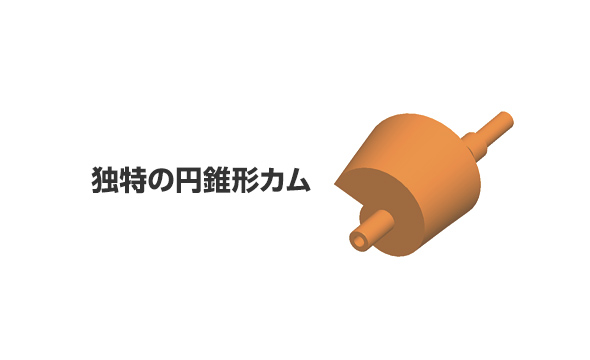
従来の点検ロボットのように直線的に打撃部が上下する直動型では必要な強さは得られないことは当初から分かっていたため、カムを使った回転型で開発を進めることにしました。カムとは運動の方向を変える部品のことです。構造はシーソーのようになっており、シーソーの一方にはカムが、反対側には打撃部が接してます。カムの断面は巻き貝のような形をしており、モーターによってカムが回転するとカムの半径が変化します。それによって打撃部を上げ下げし、ウエッジを叩きます。通常、このような機構で使うカムは円柱形ですが、今回は独特な円錐形をしています。これにより点検ロボットの形状に合わせてモーターや打撃部などを直線的に配置することが可能になりました。