力覚制御にAIを活用し、
より速い動作、より速い学習を実現。
技術紹介
労働人口の減少などにより、世界のものづくりの現場で産業用ロボットへの期待が急速に高まっています。三菱電機では当社のAI技術「Maisart(マイサート)※1」を産業用ロボットの力覚制御に適用しました。
※1「Maisart」は三菱電機AI技術ブランドの名称であり、独自のAI技術ですべてのモノを賢く(Smart)する思いを込めた、Mitsubishi Electric’s AI creates the State-of-the-ART in technologyの略です。
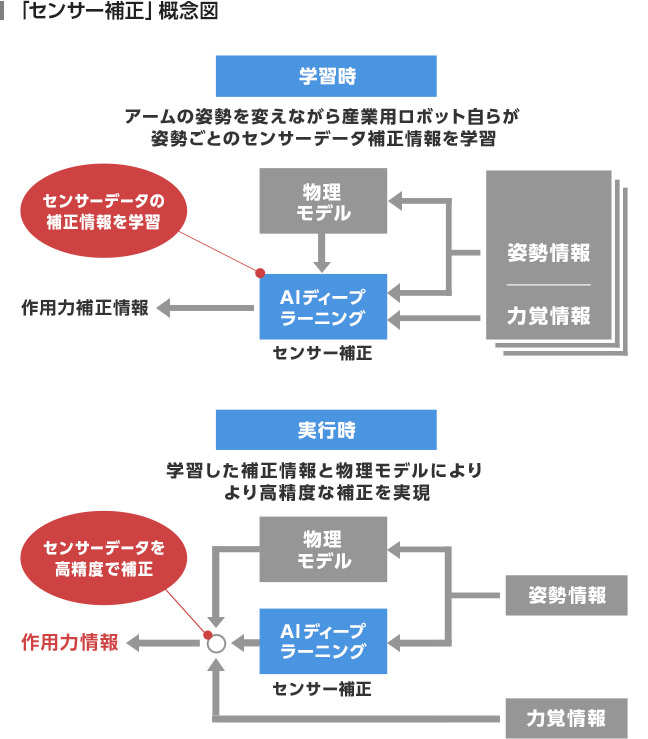
AIを活用したのは、ひとつめが「センサー補正」です。
組立作業等をする際、産業用ロボットはアームをさまざまな姿勢に変えて作業します。ロボットには、ロボットの手先にかかる力を検出する力覚センサーが付いていますが、ハンドの重量など余計な力がかかります。この余計な力は姿勢によって異なります。従来は、この余計な力を補正するため、姿勢を変えるごとにアームを一時停止しなければなりませんでした。
この「センサー補正」という行程に今回、AIを活用。姿勢に関する各種データにより生成された物理モデルと、さまざまな姿勢をとり、 産業用ロボットが自ら学んだデータを併用することで高精度な「センサー補正」が可能になりました。これにより姿勢を変えるごとに動きを止めることなく、停止レスで次の作業に進むことができ、作業時間を短縮できます。
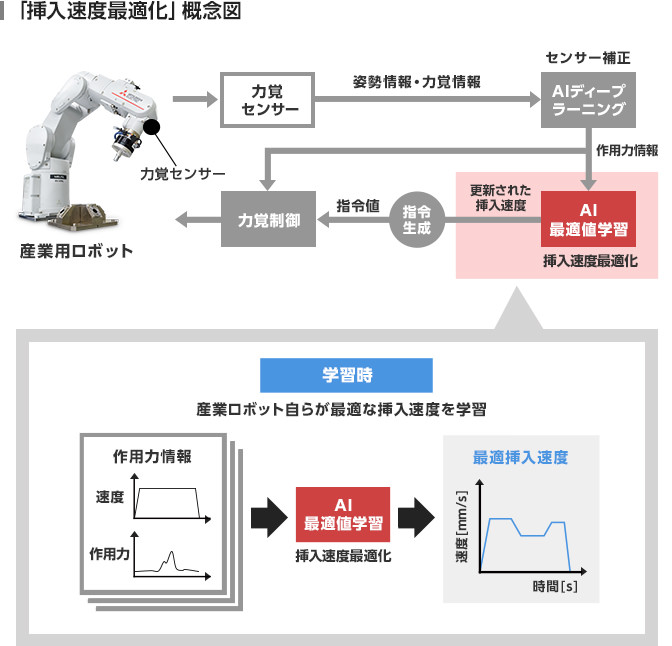
ふたつめが「挿入速度最適化」です。
力覚制御とは部品などの対象物にかかる力を制御しながら組立作業を行うための技術です。
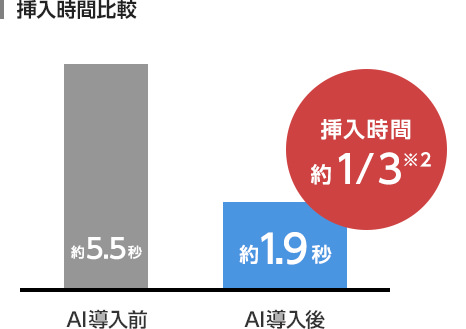
組立作業の中でも「はめあい作業」は部品の突起部を穴に挿入する作業です。突起部と穴の隙間が非常に小さい場合に、部品に大きな力をかけず挿入するには極めて繊細な動作が必要になります。そのため従来の調整方式ではひとつの部品を挿入するのに約5.5秒かかりましたが、今回AIを活用したことで約1.9秒まで高速化することに成功しました※2
※2当社での挿入動作実験での事例。
AIで挿入動作を産業ロボット自らが短時間で学習。
このような挿入動作を産業用ロボットに覚えさせるには従来は部品に過大な作用力をかけないという制約を満たすために人による試行錯誤で微妙な調整をする必要があり、多くの時間を要しました。
しかし今回の技術では最短約5分間、産業用ロボットが試行動作を繰り返すことで自ら最適な動作を学習します※2。AIを活用した「センサー補正」により、作用力の制約を満たしつつ速く挿入する、速く学習することが可能になり、生産性向上に貢献します。