MELSEC-Qシリーズ
![]()
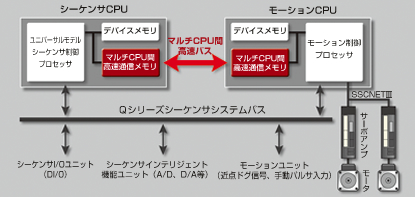
シーケンサCPUとモーションCPUによるマルチCPU制御
複雑なサーボ制御はモーションCPUで、それ以外の機械制御・情報制御をシーケンサCPUに担当させることにより処理を負荷分散できます。
用途に応じてモーションCPU、シーケンサCPU を選択することで、フレキシブルなシステム構成を実現できます。
モーションCPUのプログラムはモーションSFCで記述します。
<マルチCPU間高速バス>
■CPU間交信専用のマルチCPU間高速バスを搭載。
CPU専用のマルチCPU間高速バスにより、0.88msごとに最大14kワードの高速データ交換が可能。
■マルチCPU間高速通信周期はモーション制御に同期しており、制御の無駄を削減
[シーケンスプログラム]
●スキャン処理に適したラダー記述(条件制御重視)
![]()
●シーケンス制御(多入出力点数、複数動作対応)
●異常検出時のシステム停止処理
[モーションSFCプログラム]
●イベント処理に適したSFC記述(順次制御重視、イベント応答性の追求)
![]()
●サーボ高速応答(始動) ●位置決めアドレス、速度データの演算、速度変更
●マルチタスク、分岐機能による高機能化
<モーション専用シーケンス命令>
■モーション専用シーケンス命令が新しく生まれ変わりました。
<マルチCPU間同期割り込みシーケンスプログラム>
■モーション演算周期(0.88ms)と同期した割込みシーケンス機能を追加し、ラダーによるリアルタイムな処理が可能となりました。
使用例
①モータ実現在値を指定ポイントと比較し、通過したらシーケンサ出力をONさせます。(比較処理のばらつきはラダーのスキャンタイムに影響されず、0.88ms以内で処理されます。)
②複数台のモーションCPUに対して同時始動をかけます。
高応答制御
さらなるタクトタイム短縮の要求に応えて、モーション演算周期を0.22ms/4軸を実現しました。
演算周期0.44msにおいても、10軸までの制御を可能とし、高応答制御に対応します。
<なめらかな曲線を必要とするモーション制御に最適>
モーションコントローラからの指令データは0.22msごとにサーボアンプへ転送可能です。
モーションコントローラとサーボアンプ(MR-J4-B)、サーボモータ(HG-KRモータ:4194304PLS/rev)を組み合わせることにより、
モーションの演算周期の高速化と相まって高速でなめらかな動作を実現できます。

制御の流れ
省配線化、省スペース化
MR-J4シリーズの2軸一体サーボアンプ、3軸一体サーボアンプと組み合わせることで、配線本数、部品点数が大幅に削減できます。
例えば、3軸一体「MR-J4W3-B」を使用すると、サーボアンプの設置面積が約30%削減でき、さらなる省スペース化が図れます。
高速同期ネットワーク SSCNETIII/H

- データ送受信を従来比3倍の双方向150Mbps(片方向300Mbps)へと高速化。システムの応答性を飛躍的に向上します。
- 0.22msへと、指令通信周期を高速化
- 同期通信により、装置の高性能化を実現
SSCNETIII/Hでは、完全同期通信が可能。高精度な同期が必要な装置の高性能化を実現します。 - 最大1600mの長距離配線に対応
1系統あたり最大1600m(局間最大100m×16軸)の長距離配線が可能 - SSCNETIII/H対応品とSSCNETIII対応品との混在が可能
同一系統にSSCNETIII/H対応サーボアンプとSSCNETIII対応サーボアンプを混在して使用できます。
(混在時の通信速度:双方向50Mbps)
※SSCNET (Servo System Controller Network)
アドバンスト同期制御
ギア、シャフト、変速機、カムなどの機械機構をソフトウェアに置き換えた同期制御が簡単に実現できます。
軸ごとに同期制御の始動、停止ができます。同期制御の軸と位置決め制御の軸の混在が可能です。
同期制御にはアドバンスト同期制御とメカ機構プログラムを使用する2つの方式があり、どちらかを選択することができます。
<制御の流れ>
<同期制御パラメータ>
●パラメータ設定だけで簡単に同期制御ができます。
●主軸の移動量をクラッチ経由で出力軸へ伝達することができます。
●指令生成軸は制御軸にカウントされないため、出力軸を制御軸数分使用できます。
安全システム
モーションコントローラは「EN ISO 13849-1:2015」,「EN IEC 62061:2021」に適合しています。
二重化入出力信号の状態を確認する安全信号監視機能に加え、IEC 61800-5-2の機能(STO, SS1, SS2, SOS, SSM, SBC, SLS)を標準搭載。
これらの機能の動作条件は、シーケンサCPUとモーションCPUのラダー回路として自由にプログラミングすることができます。
速度監視機能
モータの速度が安全速度を超えないことを、モーションCPUとシーケンサCPUで監視します。
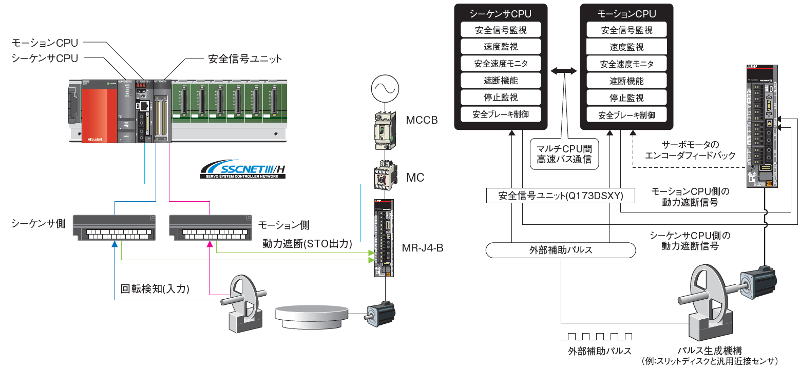
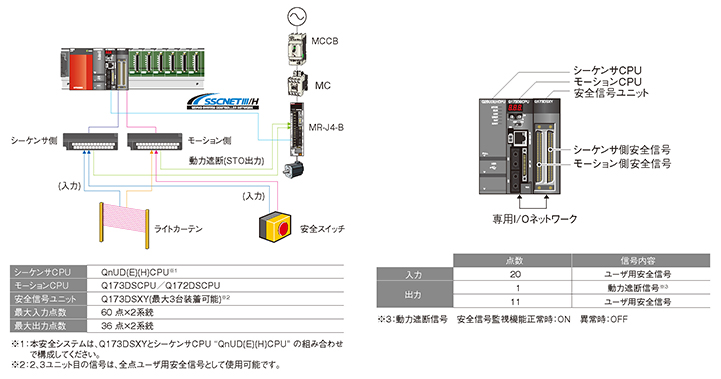
安全信号監視機能
モーションCPU、シーケンサCPU、安全信号ユニットを使用して、安全入力信号を監視できます。
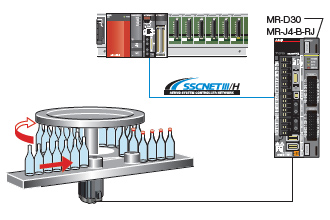
SSCNETIII/H による安全通信
サーボアンプMR-J4-B-RJと機能安全ユニットMR-D30の組み合わせにより、IEC 61800-5-2 の機能(STO, SS1, SSM, SBC, SLS)
を実現します。MR-D30のパラメータ設定で、安全監視機能の立ち上げを簡単に行うことができます。
機能安全ユニットMR-D30を使用すると、機能安全用のシーケンスプログラムをモーションコントローラで作成する必要はありません。
安全信号監視はソフトウェアバージョンB3 以降のサーボアンプで対応しています。
<MR-J4-B-RJ とMR-D30 の組み合わせによる安全システム例>
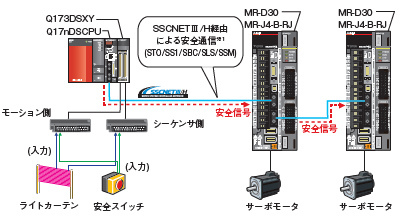
コントローラ側出力とサーボアンプ間の動力遮断(STO)の配線が不要
外部にパルス生成機構を準備しなくても、
安全速度制限(SLS)が可能
※1:SSCNETIII/Hによる安全通信は、IEC 61784-3:2010に準拠した技術を使用しています。
エンジニアリング環境MELSOFT MT Works2
より使いやすく進化したエンジニアリング環境が、モーションコントローラのシステム設計・プログラムグからデバッグ・保守までを強力にサポートします。
<システム設計>
- グラフィカルなシステム設定画面で、サーボアンプ・各種ユニットを簡単に設定できます。
- 面倒な電子ギアの設定も、機械構成(減速比、ボールネジピッチなど)を入力するだけで簡単に設定できます。
SSCNET構成
電子ギア設定
<プログラミング>
- モーションコントローラのプログラム作成を様々な便利機能でサポートします。
- 必要なモーションSFCプログラムを、流用元プロジェクトから流用先プロジェクトへ、ドラッグ&ドロップで簡単に流用可能です。
サーボプログラム一覧
<立上げ・調整>
- シミュレータ機能により、実機レスでモーションSFCプログラム、アドバンスト同期制御の机上デバッグを実現しました。
- モーション演算周期に同期したデータ収集と波形表示により、動作確認、トラブルシュートを強力に支援します。
シミュレータ
デジタルオシロ
機能一覧
| モーションコントローラ | ||
|---|---|---|
| Q173DSCPU | Q172DSCPU | |
| サーボアンプI/F | SSCNETIII/H | |
| 2系統 | 1系統 | |
| 接続サーボアンプ | MR-J5-B,MR-J5W-B詳細はこちら MR-J4-B,MR-J4W-B詳細はこちら |
|
| 最大制御軸数 | 32軸 | 16軸 |
| 演算周期 | 0.22ms~ | |
| エンジニアリング環境 | MELSOFT MT Works2、MR Configurator2 ※1 | |
| プログラム言語 | モーションSFC | |
| 制御方式 |
位置制御、速度制御、
トルク制御 カム制御、アドバンスト同期制御 |
|
| 位置決め制御 |
直線補間、円弧補間、軌跡制御、ヘリカル補間、位置追従制御、定位置停止速度制御、 高速オシレート制御、速度位置切換え制御 |
|
| 加減速処理 |
台形加減速、S字加減速、
アドバンストS字加減速 |
|
| 手動制御 | JOG運転、手動パルサ運転、同時JOG運転 | |
| 制御内容を変更する機能 | 現在値変更、目標位置変更機能、トルク制限値変更、速度変更 | |
| 原点復帰方式 |
近点ドグ式1、近点ドグ式2、スケール原点信号検出式、カウント式1、カウント式2、カウント式3、 データセット式1、データセット式2、ドグクレードル式、ストッパ停止式1、ストッパ停止式2、 リミットスイッチ兼用式、ドグレス原点信号基準式 |
|
| 補助機能 | 緊急停止機能、H/Wストロークリミット機能、S/Wストロークリミット機能、絶対位置システム、 アンプなし運転機能、無限長送り機能、任意データモニタ機能、 マーク検出機能 Mコード出力機能、エラー履歴、デジタルオシロ機能、安全監視機能、ビジョンシステム接続機能、 ソフトセキュリティキー機能 |
|
※1: MR Configurator2はMELSOFT MT Works2に含まれています。