![シナジーコラムMaisart×産業用ロボット 「AIの働く工場」が今、目の前に [前編] ライター市原淳子、三菱電機株式会社 先端技術総合研究所 自律制御システム開発プロジェクトグループ 前川清石・白土浩司](/business/biz-t/contents/synergy/img/maisart-robot/01/main.jpg)
![シナジーコラムMaisart×産業用ロボット 「AIの働く工場」が今、目の前に [前編] ライター市原淳子、三菱電機株式会社 先端技術総合研究所 自律制御システム開発プロジェクトグループ 前川清石・白土浩司](/business/biz-t/contents/synergy/img/maisart-robot/01/main_sp.jpg)

先端技術研究所は、産業用ロボットの「力覚制御」という機能に三菱電機が開発したAI技術「Maisart」を適用した。力覚制御は、組み立て作業などの際にものを適切な力でつかみ、求められた位置に正確にはめこむなどのために使われる。「Maisart」を実作業の前段階である調整作業に適用したところ、一部の作業効率は2~3倍と飛躍的に向上した。また、ごくわずかな時間のロス削減にも成功した。
INDEX
- 身近になりつつあるAI、いよいよ産業用ロボットへ
- AIの適用で熟練者のスピードを目指す
- 通常のロボットの2~3倍の高速化に成功
- ギリギリを攻めるベテラン職人のような思考力
- ごくわずかなタイムロスの削減も可能に
- 「目のつけどころがユニーク」と高評価
身近になりつつあるAI、
いよいよ産業用ロボットへ
2017年に「AIスピーカ」が発売されて以来、AIという言葉はあっという間に身近になった。AI(人工知能)とは、学習や判断、会話、創作など、これまで主に人間にしかできないと考えられてきた知的な作業をするコンピュータプログラムなどのこと。
料理に合うワインを勧めてくれるAI、ビッグデータをもとに渋滞や株価を予測するAI、将棋のプロを打ち負かすAI、クルマを自動運転するAI――。かつてSF映画やアニメに登場するものだったAIは、いつの間にか私たちの暮らしに浸透し始めているようだ。
そんなAIを適用した産業用ロボットが開発され、まもなくその一部が市場にお目見えすると言う。そこで、そのロボットを共同開発した三菱電機の先端技術総合研究所と名古屋製作所に取材した。

AIの適用で熟練者のスピードを目指す
迎えてくださったのは20年以上にわたりロボット研究に従事しているという前川清石さんと、前川さんの下で主にロボット制御を研究する白土浩司さんのお二人だ。

左:三菱電機株式会社 先端技術総合研究所 自律制御システム開発プロジェクトグループ ロボットシステムグループ主席研究員 技術士(機械部門)白土浩司さん
まず前川さんが、ご自身が携わっているロボット研究について紹介してくれた。
前川:私たちが今研究しているのは、工場などで使われる「産業用ロボット」の性能や使いやすさを向上したり、機能を追加したりすることです。産業用ロボットはもともと、ある地点から別の地点へとモノを運搬するなど、単純作業をするために使われてきました。それが次第に高性能になり、組み立て作業や製品検査ができる“賢い”ロボットが開発されるようになりました。
その賢さをさらに上げていくために今回初めて、三菱電機が開発したAI技術「Maisart(マイサート)」を適用したのです。
前川さんたちは、ロボットの「力覚制御」という機能に「Maisart」を適用した。
力覚制御とは、ロボットの手先にかかる力を制御すること。例えばロボットが組み立て作業をする場合、ロボットの手先に備えられた手(ハンド)がものをつかみ、ものに適切な力をかけながら作業をする。このとき、力をセンサで感知し、ハンドの動きを制御する力覚制御という機能を使うことで、ロボットはものを壊さずにつかんだり、適切な方向に運んで目標のポイントにぴたりとはめこんだりできるのだ。
白土:力覚制御ができるロボットを使うと、精密機器の組み立てなど、これまで人間が行なっていたような複雑で繊細な作業が可能になります。しかし、力覚制御ができるロボットの導入にあたってはひとつ大きな問題がありました。それは、作業スピードが遅くなるということです。
ロボットに難易度の高い作業をさせる場合、プログラミングする人間は「ロボットやものを壊さないように繊細に」と考えますからどうしても保守的な調整をしてしまいます。その結果、作業スピードが人間よりも遅くなってしまうのです。
今の時代、どの工場でも人員の確保は大変で、ロボット化を希望するお客さまは多いのですが、「ロボットは便利だけれど遅い」となると導入をためらわれます。その問題を解決するために「Maisart」を活用しようと考えたのです。

通常のロボットの2~3倍の高速化に成功
結論からいうと、「Maisart」の適用により作業スピード格段に高速化した。例えば、金属部品にさまざまな角度から円柱を挿入する作業の挿入時間は約1/3にまで短縮。
その成果を体感するために、ロボットと同じ作業をさせてもらった。
用意されたのは、実際の試験にも使われた金属部品。四方に計8つの穴があり、1から7までの番号が振られている。この順番通りに直径1cmほどの円柱を穴に挿入するのだが……。
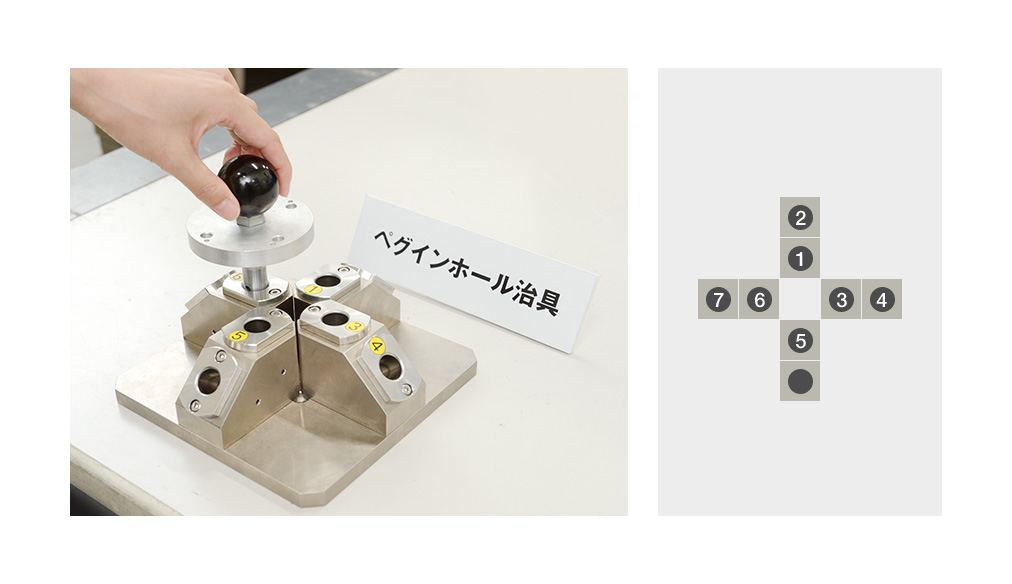
穴と円柱の直径がほとんど同じせいか、素早く手を動かそうとしても、円柱がスッと入っていかないのがもどかしい。何度か試してみたが、結局のところ1周するのに30秒近くかかってしまった。
単純作業ではあるが集中力は求められる。熟練者であってもこの作業を何度もくり返すのは、正直いってかなりつらそうだ。こうしたところにもロボット化の意義が感じられる。
では、ロボットがこの作業をするとどうなるか。


「Maisart」を適用したロボットでは、円柱を穴に挿入する作業がなんと1.9秒で完了。あまりにも速く終わってしまい、動きを目で追いきれないほどだ。
次に「Maisart」を適用したロボット、未適応のロボットの作業時間を比較した動画を見せてもらった。「Maisart」未適用のほうは作業時間5.5秒。どちらもロボットを使っているとはいえ、AIがあるのとないのとでは、所要時間に約3倍の差が生まれる。
動きの印象もどことなく違う。「Maisart」未適応のロボットのほうは恐る恐る動いているようなのに対して、「Maisart」適用ロボットは迷いなくスパッと円柱を穴に入れて、キビキビと作業しているように見える。
前川:力覚センサのデータを見てみると、ロボットにかかっている力の最大値はほぼ同じ。「Maisart」適用のほうが力をかけて動くわけではないんです。「Maisart」適用ロボットは「ここまでは力をかけていい」という条件の中で、速度を上げていいところは上げ、抑えるべきところは抑えて、もっとも速く動けるプロセスを探し出せたということです。
他の試験でも同様の結果が出ている。
「Maisart」適用により、ベアリングへの軸挿入作業ではロボットの作業時間が2.4秒から1.1秒へと2倍以上短縮された。また、コネクタの挿入作業では1.2秒から0.4秒と、3倍の高速化を実現した。
前川:ここまで速くなると、人とほぼ同じレベルです。力覚制御に「Maisart」を適用したことにより、電子部品の組み立て作業などではロボットが人間の代わりに活躍できる可能性は確実に高まったと言えます。
ギリギリを攻める
ベテラン職人のような思考力
「Maisart」を適用した制御技術が活躍するのは、ロボットが生産現場で稼働する前の「調整作業」のときだ。
通常の調整作業では、熟練者がロボットを動かしながら力覚センサの情報を見て、力がかかり過ぎていたら速度を下げ、余力があればスピードアップして、と試行錯誤しながらロボットのプログラムを微調整する。
白土:プログラムとは、その指示内容を正しく記載した命令書のようなものです。例えば、ロボットに物をつかむという単純な動きをさせるだけでも、XYZの3軸座標で位置や動作を細かく指定しなければなりません。ロボットに複雑な動きをさせようとすれば、プログラムも長く複雑になります。
さらに力覚制御のような高度な機能を活用する場合には、ロボットの調整はより複雑になり、簡単には終わりません。あるパラメータ(調整する項目)を調整すると、今度は別のパラメータにも影響が及びます。調整の利き具合を考慮しつつ同時に複数パラメータの調整を行う、といった具合。このようなロボットを使いこなすのはかなり大変なんです。
前川:私たちはこの調整作業に「Maisart」を適用しました。実際にロボットを動かして、その結果を「Maisart」を適用した力覚制御にフィードバックして修正結果を出力する。この作業を何度かくり返したところ、「Maisart」を適用した力覚制御はわずか5分間で最適な動きを導き出しました。その結果が、さきほどの1.9秒の作業プロセスです。
白土:人間がロボットの調整をするときは「ロボットを壊したくない」という心理が働きますから、どうしてもプログラムに少し余裕をもたせてしまいます。しかしAIはそんな思考や心理を持ち合わせていませんから、「ここを超えてはいけない」という制限の中で、ギリギリの動きを導き出そうとする。これは、ある意味で超ベテラン職人のような振る舞いです。

ごくわずかなタイムロスの削減も可能に
今回の成果にはもう1つの点で「Maisart」を適用した制御技術が貢献している。それは、ロボットの停止時間の削減だ。
力覚センサはロボットの手首にあり、その先にハンドがついている。ハンドは重力の影響を受けるため、ハンドがものをつかんで組み立て作業をしているとき、力覚センサは「ものに接触して生じる力」とともに重力の影響も感知してしまう。しかし、ハンドを正確に制御するためには重力の情報はキャンセルして、「ものに接触してかかる力」の情報だけを取り出したい。
これまで力覚制御を開発してきた前川さんたちも重力の計算に挑んできたが、ハンドにかかる「ものに接触して生じる力」以外の力は作業内容や工場の環境によって変化するため、どうしてもわずかな誤差が生じ、目標とした高精度な答えは得られなかった。
前川:これまでは重力の影響をキャンセルするために、力覚制御の動作に入る直前に一瞬ロボットを止めて、そのときの重力の情報を力覚センサで感知し、その分を差し引くという時間が必要でした。
停止時間は1秒以内とごくわずかではありますが、その積み重ねが工場の効率に響きます。私たちはその停止時間の削減を実現したかったのです。

「目のつけどころがユニーク」と高評価
「Maisart」による力覚制御が搭載されたロボットのデモシステムは、「2017国際ロボット展」に参考出展された。来場者からは「いつ発売されるのか」といった好意的な反応は得られたと、白土さんはほっとしたように話す。
白土:AIの専門家の方からは「力覚制御とは、面白いところにAIを適用してきたね」といったご感想をいただきました。今は、AIを視覚センサや音声認識に適用するのが主流ですから、力覚制御を選んだという点が関心を引いたのだと思います。
私たちは、AIをどこに適用すれば生産現場の環境がもっとよくなり、お客さまに喜んでいただけるのかを考え抜き、力覚制御をターゲットにしました。その意味では狙いが的中し、開発に成功できたことは幸運です。これからもお客さま目線で考えながら、AIの活用範囲を広げていきたいと考えています。
前川:今回の成果によって、人間の代わりにロボットが働ける余地がひとつ増えたと言えます。しかし、人間が複雑な作業をしている工場はまだたくさんあります。私たちはそういった場所で本当に役立つロボットをこれからも開発していきたい。
いつか、日本中のどの工場に行っても我々が開発した三菱電機のロボットがたくさん働いている。そんな状況にできたらいいですね。
※「Maisart」は三菱電機AI技術ブランドの名称であり、 独自のAI技術ですべてのモノを賢く(Smart)する思いを込めた、Mitsubishi Electric's AI creates the State-of-the-ART in technologyの略です。
