

ビジュアル ハプティクス

-
今回は、ロボットの「テレプレゼンス」のお話しじゃ。今後、この分野での事業やサービスがどんどん広まっていくことが期待されておるぞ。
-
ロボットの「テレプレゼンス」って、オペレータの手の動きがネットワークを介して遠隔地にあるロボットにそのまま再現されて、あたかもその場にいるかのように作業ができるというものですよね。
-
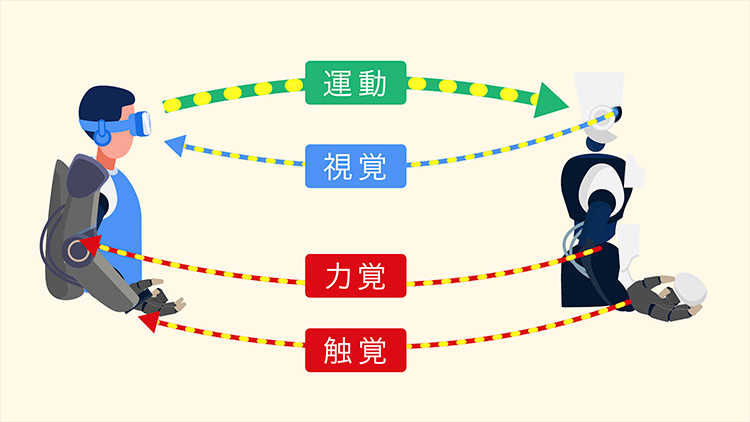
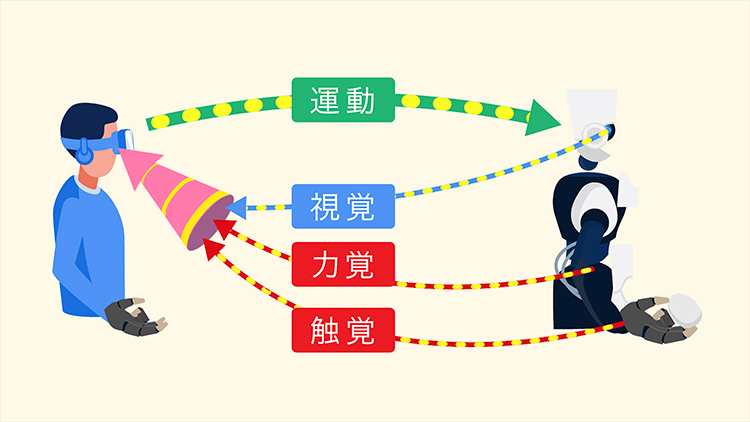
そうじゃ。従来は、遠隔地からは、ロボットが見ているもの(視覚)、ロボットが触っている感覚(触覚)、そして、どのくらいの強さで触っているか(力覚)が別々に送られてくる、というものじゃった。
従来
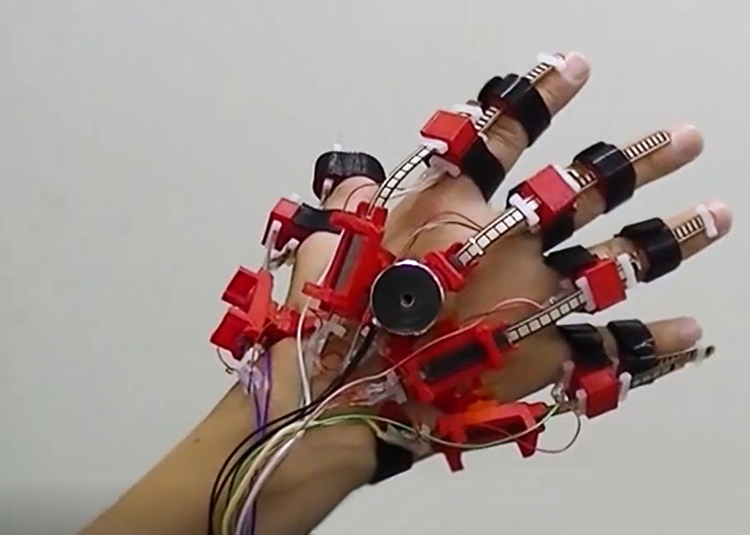
オペレータの装備。
モータで動く。
-
オペレータさん、動きにくそう。手が重そう。。。
-
そのとおりじゃ。さらに設備が大がかりになる上に、どうしても「力覚」と「触覚」が、「視覚」から予測される感覚からずれてしまうので、違和感が大きく、オペレータの身体的・精神的負担が大きいことが課題じゃった。
-
オペレータが快適に操作できるようにならないと、なかなか普及するのは難しいんじゃないですか。
-
そうじゃ。そこで三菱電機が開発したのが、ビジュアル ハプティクス (Visual Haptics)じゃ。”Haptics”とは「触覚」のことじゃが、「力覚」も含め、ロボットが触っている感覚を目で見てわかるようにしたんじゃ。
ビジュアル ハプティクス
-
触った感覚が見えるってどんな感じかしら。
-
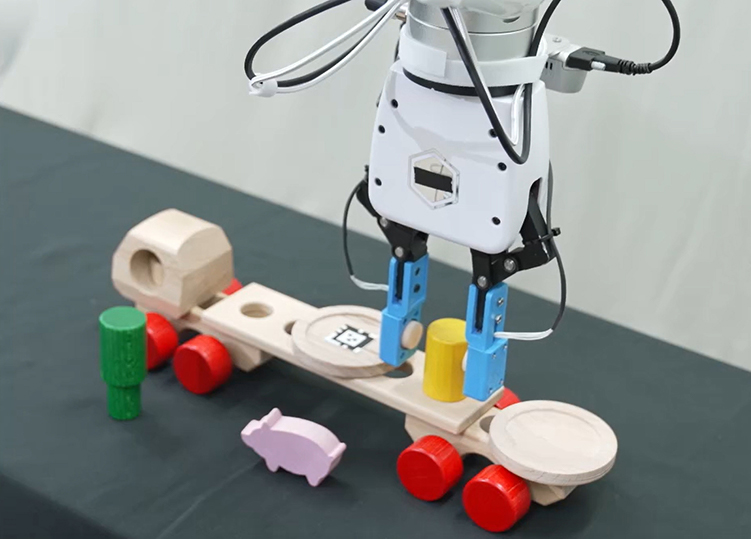
遠隔地のロボットが触っている指の部分がオペレータには光って見える。さらに触る強さによって光の強さが変わるんじゃ。こんな感じじゃ。
-
わぁ~、光ってる~。遠隔地で触っているっていうことが、こんな風に見えて伝わるって、なんか不思議な感じ。。。
-
遠隔地の「触覚」と「力覚」が「視覚」として目に伝わることにより、オペレータの身体的・精神的なストレスを軽減するということが、オペレータの脳波を分析した結果でも明らかになっておるのじゃ。操作のしやすさ、優しく物をつかめるかどうかという点でも、ビジュアル ハプティクスの効果は検証済じゃ。
-
優しく物をつかむって、「生卵」みたいなデリケートな物もつかめちゃいますか?
-
もちろん! ポテトチップス、シュークリーム...なんでもござれじゃ。今後は、オペレータが同じ動作を繰り返すうちに、その動作を学習して、自動化させることで効率化が進み、一人のオペレータが複数の遠隔ロボットを操作するということも可能になる予定じゃ。
-
これからは、ビジュアル ハプティクスのおかげで、いろいろな場所や、いろいろな分野で、テレプレゼンスが活躍しそうですね。わくわくしますね~。
-
この技術の開発を進めながら、テレプレゼンスの適用先や、サービスの事業化も同時に検討を進めておる。ゆくゆくは世界中で使われるようになり、例えば、人口減少が進む先進国の仕事を、途上国で行うということも可能になれば、先進国への出稼ぎで残された家族が寂しい思いをすることもなくなることになるぞ。
-
すご~い! スケールの大きな社会課題の解決にビジュアル ハプティクスが役立っちゃうんですね。
-
仕事場所への移動にかかる時間やそのためのエネルギー消費の削減にも貢献することになるのじゃ。あとはオペレータがちゃんと時間どおりに仕事を始めるだけじゃ。オペレータが遅れ~た、では済まんぞ。
-
博士、、、寒い!? 。
人×機械の遠隔機械操作システム
遠隔にある観測施設の保守点検、頻発する自然災害対応、不発弾・即席爆弾処理、新型コロナウィルス除菌作業等の身体的・精神的な負担の高い作業に対して、遠隔機械操作システム技術は人の安全と安心を実現します。大型望遠鏡事業で培った機構設計・駆動制御技術を適用した人型遠隔操作ロボットは、安定した把持を可能にするセルフロック機能を搭載した多指ハンドと、ハイパワー出力を可能にする直動リンク機構を持っています。オペレータの操作負荷を最小限にするシンプルかつ直感的な操作インターフェースは、遠隔機械の力触覚情報を視覚的にフィードバックする視覚的力触覚技術を適用しています。視覚的力触覚フィードバックが脳内情報流の45%低減効果、及び視覚以外のモーダル(音と振動)フィードバックに対する優位性をもつことを脳波信号から確認しました。これらの技術を統合した小型遠隔操作ロボットは、6kgの硬く重いアルミニウム部材から壊れやすい生卵やポテトチップスまでをシンプルな操作インターフェースでありながら直感的に把持・運搬可能です。

人×機械の遠隔融合システムが実現する、
“どこにいても、いつでも、“手”を取り合える共生の世界”(イメージ)
TMT(Thirty Meter Telescope)ロボット開発で培った要素技術群を適用したハイパワーな人型遠隔操作ロボット、及び視覚的力触覚を搭載したシンプルかつ直感的な捜査インターフェースの統合によって、人の身体的・精神的な負荷を解放し、さらに”拡張”への進化をめざします。遠隔機械操作システムは人の安心と安全、慣れ親しんだ地域で家族や友人との生活を維持できる遠隔労働を可能にし、どこにいて、いつでも”手”を取り合える共生社会の実現を目指して開発を推進してまいります。
◆「ビジュアル ハプティクス」をこちらでも紹介しています。

