![]()
ダウンロード
制御機器 サーボシステムコントローラのサンプルライブラリを探す
設定・プログラミング支援 - サンプルプログラム・ライブラリ - サーボシステムソリューションサンプルプログラム
vol.10 ナットランナー装置
言語
日本語 英語
概要
サーボシステムソリューション(vol.10 ナットランナー装置)のサンプルプログラムです。

【システム構成】

«使用機器・ソフトウェア»
| シーケンサCPU:Q04UDEHCPU | シンプルモーションユニット:QD77MS4 | GOT:GT27**-V |
| 基本ベース:Q35B | サーボアンプ:MR-J4W2-B | |
| 電源ユニット:Q62P | サーボモータ:HG-KR | |
| エンジニアリング環境:MELSOFT GX Works2(シーケンサ),MELSOFT GT Works3(GOT) | ||
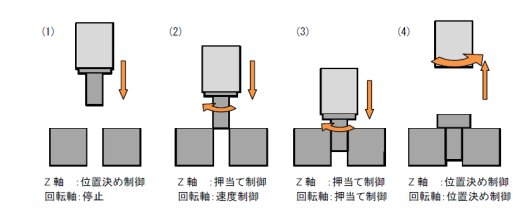
【動作概略】
(1) X,Y軸で工具先端をネジ締め箇所に位置決めした後,Z軸を位置決め制御で下降させます。
(2) ネジがワークに接触すると,Z軸は位置決め制御から押当て制御に切換え,回転軸を速度制御で駆動します。
(3) Z軸が一定値以下まで進んだら,回転軸も押当て制御に切換えます。ネジが締まって速度が一定値以下になったとき,回転軸のトルクをネジの締め付けトルクに変更します。
(4) 締め付けトルクで一定時間締め付けた後,Z 軸と回転軸を退避位置まで位置決め制御で戻します。
【制御のポイント】
Point1:回転軸の速度とトルクを工程にあわせて制御することにより,トルクセンサを使用せず,オープンループでネジ締めが可能になります。
Point2:押当て制御により,位置制御からトルク制御への切換え時にトルクが急変せず,スムーズな動作が可能です。
Point3:Z軸と回転軸の制御モード切換えなど,ラダープログラムをファンクションブロックによって記述できます。
サンプルライブラリ
| 名称 | サイズ (バイト) | 更新日 | ダウンロードファイル |
|---|---|---|---|
| vol.10 ナットランナー装置 | 589,579 | 2014-11-21 | vol10_screw_a.zip |
関連マニュアル
|
|
vol.10 ナットランナー装置 動作説明資料(日本語版) |
|---|---|
|
|
vol.10 ナットランナー装置 動作説明資料(英語版) |
|
|
押当て制御用ファンクションブロック(FB)ライブラリ(日本語版) |
著作権
三菱電機株式会社
圧縮ファイルの展開手順
任意のフォルダに、ファイルをダウンロードしてください。
ダウンロードしたファイルを解凍すると,サンプルプログラム名のフォルダが作成されます。
[解凍方法① ZIP対応の解凍機能のあるOSの場合]
| 1. | ダウンロードしたファイルを右クリックします。 |
| 2. | 「すべて展開...」を選択してください。 「すべて展開...」の表示がない場合は,解凍方法②を行ってください。 |
| 3. | 展開先を指定して、「展開」ボタンをクリックすると解凍されます。 |
[解凍方法② ZIP対応の解凍機能のないOSの場合]
| 1. | ZIP対応の解凍ツールをお持ちでない方は、解凍ツールを入手してください。 |
| 2. | 解凍ツールを使用して解凍します。 ※解凍ツールの使用に関しては、全てお客様の責任において行ってください。 |
- お問い合わせ
 購入・見積もり
購入・見積もり 仕様・機能
仕様・機能- よくあるご質問(FAQ)