![]()
ダウンロード
制御機器 サーボシステムコントローラのサンプルライブラリを探す
設定・プログラミング支援 - サンプルプログラム・ライブラリ - サーボシステムソリューションサンプルプログラム
vol.03 アライメント装置
言語
日本語 英語
概要
サーボシステムソリューション(vol.03 アライメント装置)のサンプルプログラムです。

【システム構成】
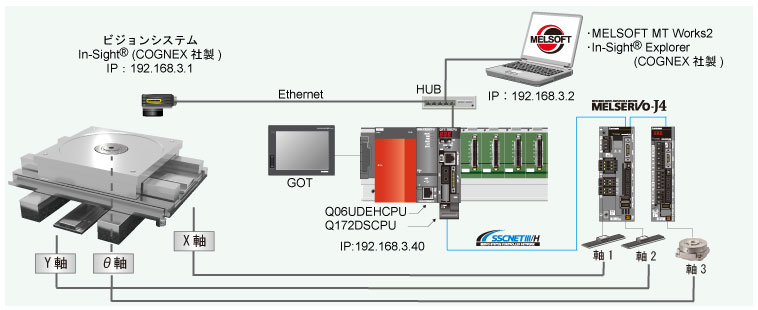
«使用機器・ソフトウェア»
| モーションCPU:Q172DSCPU | サーボアンプ:MR-J4W2-B,MR-J4-B | リニアサーボモータ:LM-H3 |
| シーケンサCPU:Q06UDEHCPU | GOT:GT165*-V | ダイレクトドライブモータ:TM-RFM |
| 基本ベース:Q35DB | ビジョンシステム:In-Sight®シリーズ | |
|
エンジニアリング環境:MELSOFT MT Works2(モーションコントローラ),MELSOFT GX Works2(シーケンサ), MELSOFT GT Works3(GOT),In-Sight® Explorer(ビジョンシステム(COGNEX社製)) |
||
| モーションCPU本体OS:SW8DNC-SV22QL | ||
【動作概略】
アライメントテーブル上でワーク位置のずれ量をビジョンシステムで検出して位置補正を行います。
【制御のポイント】
Point1:モーションコントローラとビジョンシステムを直接Ethernet接続して,専用SFC命令により高速に画像処理結果(正規位置とのずれ量)を取得します。
Point2:X,Y軸でリニアサーボモータ,θ軸でダイレクトドライブモータを使用して,位置指令をダイレクトに装置に伝え,ギアのガタやバックラッシュなどが無く高精度で高応答な位置決めを行います。
サンプルライブラリ
| 名称 | サイズ (バイト) | 更新日 | ダウンロードファイル |
|---|---|---|---|
| vol.03 アライメント装置 | 729,682 | 2013-06-03 | vol3_alignment_a.zip |
関連マニュアル
|
|
vol.03 アライメント装置 動作説明資料(日本語版) |
|---|---|
|
|
vol.03 アライメント装置 動作説明資料(英語版) |
著作権
三菱電機株式会社
圧縮ファイルの展開手順
任意のフォルダに、ファイルをダウンロードしてください。
ダウンロードしたファイルを解凍すると,サンプルプログラム名のフォルダが作成されます。
[解凍方法① ZIP対応の解凍機能のあるOSの場合]
| 1. | ダウンロードしたファイルを右クリックします。 |
| 2. | 「すべて展開...」を選択してください。 「すべて展開...」の表示がない場合は,解凍方法②を行ってください。 |
| 3. | 展開先を指定して、「展開」ボタンをクリックすると解凍されます。 |
[解凍方法② ZIP対応の解凍機能のないOSの場合]
| 1. | ZIP対応の解凍ツールをお持ちでない方は、解凍ツールを入手してください。 |
| 2. | 解凍ツールを使用して解凍します。 ※解凍ツールの使用に関しては、全てお客様の責任において行ってください。 |
- お問い合わせ
 購入・見積もり
購入・見積もり 仕様・機能
仕様・機能- よくあるご質問(FAQ)