![]()
ダウンロード
制御機器 サーボシステムコントローラのサンプルライブラリを探す
設定・プログラミング支援 - サンプルプログラム・ライブラリ - サーボシステムソリューションサンプルプログラム
vol.08 省エネを考慮した搬送装置
言語
日本語 英語
概要
サーボシステムソリューション(vol.08 省エネを考慮した搬送装置)のサンプルプログラムです。

【システム構成】
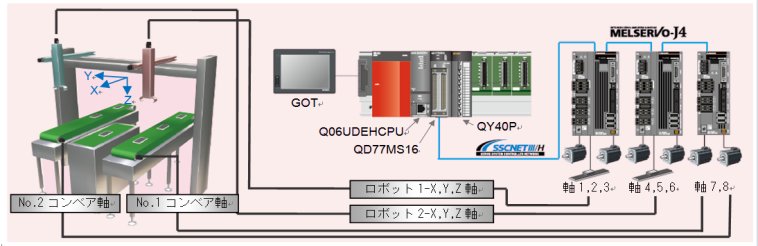
«使用機器・ソフトウェア»
| シーケンサCPU:Q06UDEHCPU | シンプルモーションユニット:QD77MS16 | GOT:GT165*-V |
| 基本ベース:Q35DB | 出力ユニット:QY40P | サーボアンプ:MR-J4W3-B,MR-J4W2-B |
| サーボモータ:HG-KR | リニアサーボモータ:LM-H3 | |
| エンジニアリング環境:MELSOFT GX Works2(シーケンサ),MELSOFT GT Works3(GOT) | ||
【動作概略】
No.1 コンベアから流れてくるワークをロボット1 で掴んでコンベア間の置台に置きます。 置かれたワークをロボット2 が掴んでNo.2 コンベアに置きます。
【制御のポイント】
Point1:多軸一体サーボアンプにより,減速時の回生エネルギーを別の軸の力行エネルギーに使用して省エネ化を図ります。
Point2:サーボアンプの消費電力をリアルタイムにモニタできるため,GOT 画面に表示させることにより省エネ意識の向上に役立ちます。
Point3:同期制御を使用してロボットとコンベアを同期運転することにより,ワークを掴む時,または 置く時に一旦コンベアを停止させなくてもよいため,通常の間欠運転と比べ,省エネ化とタクトタイムの向上を図ることが可能です。
サンプルライブラリ
| 名称 | サイズ (バイト) | 更新日 | ダウンロードファイル |
|---|---|---|---|
| vol.08 省エネを考慮した搬送装置 | 648,334 | 2014-07-31 | vol8_eco_a.zip |
関連マニュアル
|
|
vol.08 省エネを考慮した搬送装置 動作説明資料(日本語版) |
|---|---|
|
|
vol.08 省エネを考慮した搬送装置 動作説明資料(英語版) |
著作権
三菱電機株式会社
圧縮ファイルの展開手順
任意のフォルダに、ファイルをダウンロードしてください。
ダウンロードしたファイルを解凍すると,サンプルプログラム名のフォルダが作成されます。
[解凍方法① ZIP対応の解凍機能のあるOSの場合]
| 1. | ダウンロードしたファイルを右クリックします。 |
| 2. | 「すべて展開...」を選択してください。 「すべて展開...」の表示がない場合は,解凍方法②を行ってください。 |
| 3. | 展開先を指定して、「展開」ボタンをクリックすると解凍されます。 |
[解凍方法② ZIP対応の解凍機能のないOSの場合]
| 1. | ZIP対応の解凍ツールをお持ちでない方は、解凍ツールを入手してください。 |
| 2. | 解凍ツールを使用して解凍します。 ※解凍ツールの使用に関しては、全てお客様の責任において行ってください。 |
- お問い合わせ
 購入・見積もり
購入・見積もり 仕様・機能
仕様・機能- よくあるご質問(FAQ)