![]()
ダウンロード
ロボット 産業用・協働ロボット MELFAのソフトウェアを探す
サンプルプログラム、ライブラリ - RapidPlan専用連携機能 - MELFAライブラリとサンプルプログラム
RapidPlan専用連携機能用 MELFAライブラリとサンプルプログラム
言語
日本語
概要
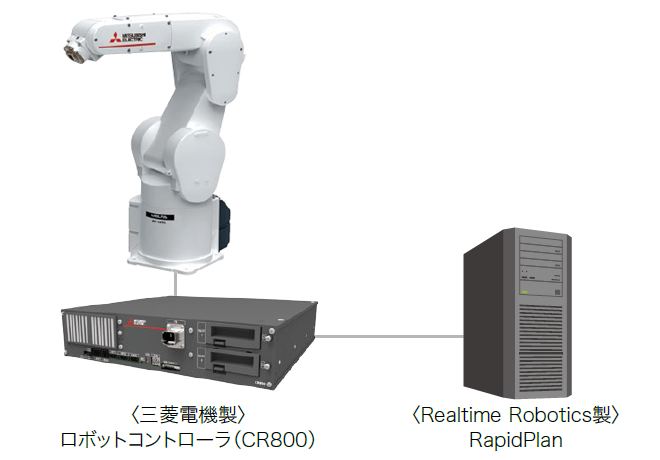
RapidPlan専用連携機能とは、「ロボットシステム構築」を容易に実現するために、Realtime Robotics社と共同開発した機能です。
以下のようなお悩みを持つお客様にオススメです。
・チョコ停時やロボットの複数台使用時やティーチング時の失敗や破損を防ぎたいお客様
・障害物を考慮しなければならないロボット立ち上げを今より早くやりたいお客様
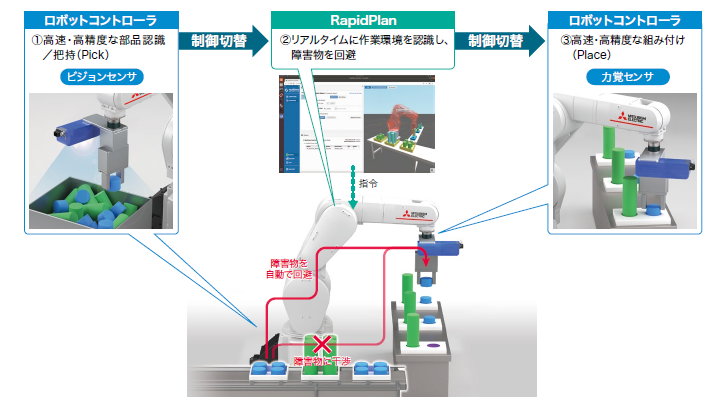
RapidPlanは作業空間の変化を三次元でリアルタイムに認識し障害物を高速かつ滑らかに回避する動作を実現する機能です。
終点の位置を与えるだけで、自動でぶつからない経路を生成します。また、複数台ロボット使用時は、互いにぶつからない経路をリアルタイムに自動生成します。
これにより、障害物を考慮しなければいけない状況でも安心・安全かつ短時間での立ち上げを実現します。
ここでは、MELFAライブラリとサンプルプログラムがダウンロードできます。
ソフトウェアをダウンロードされた場合、本契約書に同意されたものとします。
- MELFAライブラリ
ロボットプログラムからRapidPlanへ制御権切替することができます。これによりビジョンや力覚センサー等を用いた高度な位置決めや組立は「MELFA制御」で、目的位置までの移動(補間)は「RapidPlan制御」で行います。 - サンプルプログラム
システム詳細設計を行わなくても、RapidPlan専用連携機能をすぐに試使用することが可能です。適用効果、立上・操作イメージを体験できます。
- MELFAと同じ操作でRapidPlanを制御可能。従来ロボットと同じ操作感で停止・再開、速度変更が行えます。
ティーチングボックスによりプログラムのステップ実行が行えるため、プログラミングやデバックも容易です。
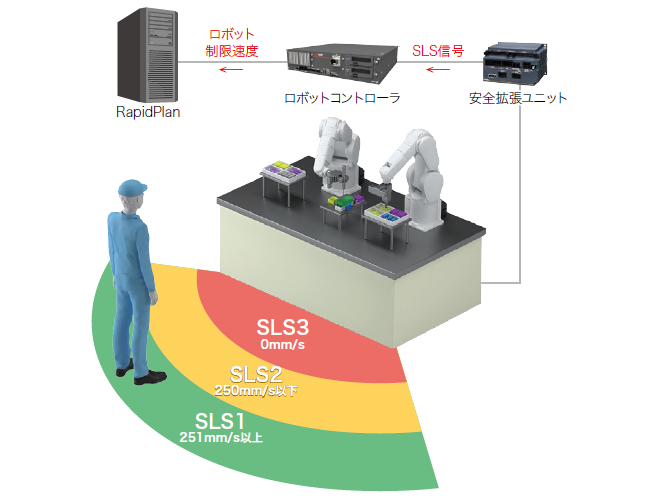
- ロボット安全オプションによる安全速度監視機能がRapidPlan制御中にも可能であり(MELFA制御中は常に有効) 、安全なロボットシステム構築を実現。
対象機種
対応コントローラ
CR800-D、CR800-R
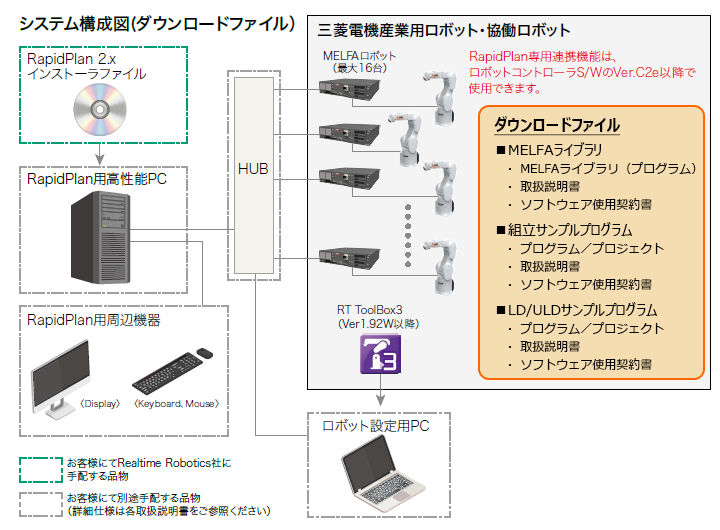
・CR800-D、CR800-RのソフトウェアVer.C2e以降で対応しています。
・CR800-Qは対応しておりません。
対応コントローラバージョン
本件ソフトウェアはRealtime Robotics社製のRapidPlanのVer.2.xと弊社ロボットコントローラのVer C2e以降での組合せでご使用頂けます。
対応機種
RV-2FR-D/R、RV-2FRB-D/R、RV-2FRL-D/R、RV-2FRLB-D/R、
RV-4FR-D/R、RV-4FR-D/R-SH、RV-4FRC-D/R、RV-4FRM-D/R、RV-4FRL-D/R、
RV-4FRL-D/R-SH、RV-4FRLC-D/R、RV-4FRLM-D/R、
RV-7FR-D/R、RV-7FR-D/R-SH、RV-7FRC-D/R、RV-7FRM-D/R、RV-7FRL-D/R、
RV-7FRL-D/R-SH、RV-7FRLC-D/R、RV-7FRLM-D/R、RV-7FRLL-D/R、RV-7FRLL-D/R-SH、RV-7FRLLC-D/R、RV-7FRLLM-D/R、
RV-13FR-D/R、RV-13FR-D/R-SH、RV-13FRC-D/R、RV-13FRM-D/R、RV-13FRL-D/R、
RV-13FRL-D/R-SH、RV-13FRLC-D/R、RV-13FRLM-D/R、
RV-20FR-D/R、RV-20FR-D/R-SH、RV-20FRC-D/R、RV-20FRM-D/R、
RV-8CRL-D、
RV-5AS-D
サンプルライブラリ
| 名称 | サイズ (バイト) | 更新日 | ダウンロードファイル |
|---|---|---|---|
| MELFAライブラリ(モーションプランニング用) | 5,076,827 | 2023-11-22 | 3F-RTR-LIB-MP-J.zip |
| 組立サンプルプログラム | 224,266,218 | 2023-11-22 | 3F-RTR-PRG-AS-J.zip |
| LD/ULDサンプルプログラム | 118,651,890 | 2023-11-22 | 3F-RTR-PRG-LD-J.zip |
ソフトウェアをダウンロードされた場合、本契約書に同意されたものとします。
ダウンロードファイルの内容
| 名称 | 内容 |
|---|---|
| MELFAライブラリ(モーションプランニング用) | MELFAライブラリ、RapidPlan連携機能・MELFAライブラリ取扱説明書、 ソフトウェア使用契約書 |
| 組立サンプルプログラム | 組立作業用 ロボット1、ロボット2用 プログラム(RT ToolBox3プロジェクト)、 RapidPlanプロジェクト、組立サンプルプログラム取扱説明書、ソフトウェア使用契約書 |
| LD/ULDサンプルプログラム | 加工機へのLD/ULD作業用 ロボットプログラム(RT ToolBox3プロジェクト)、 RapidPlanプロジェクト、LD/ULDサンプルプログラム取扱説明書、ソフトウェア使用契約書 |
圧縮ファイルの展開手順
| 1 | パソコンのハードディスク上に,任意のフォルダを作成します。 |
| 2 | 作成した任意のフォルダにファイルをダウンロードし保存します。 |
| 3 | ダウンロードしたファイルを、作成した任意のフォルダに解凍してください。 |
インストール方法(MELFAライブラリ)
| 1 | RT ToolBox3のバックアップフォルダに、解凍したMELFAライブラリをコピーしてください。 |
| 2 | RT ToolBox3のリストア機能を使用して、MELFAライブラリをリストアしてください。 |
| ※インストール方法の詳細は、MELFAライブラリ取扱説明書を参照してください。 |
インストール方法(サンプルプログラム)
| 1 | RT ToolBox3のワークスペースに、解凍したRT ToolBox3プロジェクトをコピーしてください。 |
| 2 | RT ToolBox3を使用して、プログラムをロボットコントローラにコピーしてください。 |
| 3 | RapidPlanプロジェクトを、RapidPlan用高性能PCにコピーしてください。 |
| ※インストール方法の詳細は、サンプルプログラム取扱説明書を参照してください。 |
関連機能
MELSEC iQ-Rシリーズ シーケンサからロボットを制御可能なFBライブラリをご提供可能です。
著作権
三菱電機株式会社
- お問い合わせ
 購入・見積もり
購入・見積もり 仕様・機能
仕様・機能- よくあるご質問(FAQ)