制御機器 シーケンサ MELSEC iQ-F ソフトウェア
位置決め通信プロトコル支援FBライブラリ(アイエイアイ編)

サンプルプログラム・ライブラリ - ロボシリンダー - 株式会社アイエイアイ
言語
日本語, 英語, 中国語(簡体字)
概要
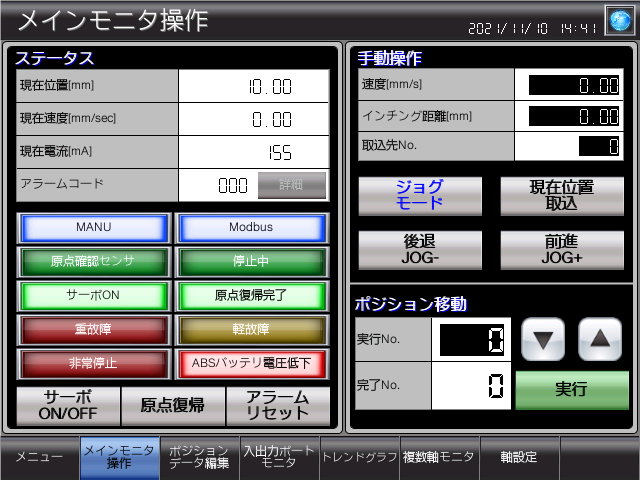
MELSEC iQ-Fシリーズの位置決め通信プロトコル支援機能を用いて、アイエイアイ社製ロボシリンダコントローラとRS-485通信を行うためのFBライブラリとサンプルプロジェクトです。サンプルプロジェクトを使用すれば、アクチュエーターの現在値や設定値のモニタ、変更をGOT画面から簡単に行うことができます。
※本FBライブラリ・サンプルプロジェクトを使用するには、あらかじめ位置決め通信プロトコル支援ツールの通信プロトコル情報書込み機能で、プロトコル設定データを書き込んでおく必要があります。
対象機種
FX5U/FX5UC CPUユニット
対象エンジニアリングツール
GX Works3
GT Designer3
タイプ
FB
サンプルプロジェクト
備考
提供FBは,お客様の装置での動作を保証しておりません。デバイスの割付,パラメータ等を確認のうえ,お客様の装置の仕様に合わせて使用頂くようお願いします。
ソフトウェア
| 名称 | バージョン |
サイズ
(バイト) | 更新日 | ダウンロードファイル |
|---|---|---|---|---|
| 位置決め通信プロトコル支援FBライブラリ(アイエイアイ編) | 1.03 | 30,291,026 | 2022/05/09 | fb_positioningsupportiai_f_v103.zip |
関連ソフトウェア
| ソフトウェア名 | 形名 |
|---|---|
| 位置決め通信プロトコル支援ツール |
関連マニュアル
| 資料番号 | タイトル | 言語 |
|---|---|---|
| SH-082261-E | MELSEC iQ-F FX5 位置決め通信プロトコル支援FBライブラリ(アイエイアイ編) | 日本語 |
| SH-082262ENG-E | MELSEC iQ-F FX5 Predefined Protocol Support for Positioning Function Block Reference (for IAI) | 英語 |
| SH-082263CHN-E | MELSEC iQ-F FX5 Predefined Protocol Support for Positioning Function Block Reference (for IAI) | 中国語(簡体字) |
接続ガイド
| ファイル名 | 技術資料名 | 言語 |
|---|---|---|
| L08851a.pdf | かんたん接続ガイド 位置決め通信プロトコル支援FBライブラリ(株式会社アイエイアイ編) | 日本語 |
| L08852ENG-A.pdf | Quick Connection Guide Predefined Protocol Support For Positioning Function Block Library (IAI Corporation) | 英語 |
| L08853CHN-A.pdf | 简单连接指南 定位通信协议支持FB库(株式会社IAI篇) | 中国語(簡体字) |
サンプルプロジェクトマニュアル
| ファイル名 | マニュアル名 | 言語 |
|---|---|---|
| iQ-F_GT27_IAI_Ver1_J.pdf | 株式会社アイエイアイ ロボットコントローラロボシリンダーサンプルプロジェクト説明書 | 日本語 |
| iQ-F_GT27_IAI_Ver1_E.pdf | IAI Corporation Robot Controller ROBO Cylinder Sample Project Manual | 英語 |
| iQ-F_GT27_IAI_Ver1_C.pdf | IAI Corporation Robot Controller ROBO Cylinder Sample Project Manual | 中国語(簡体字) |
FB
| FB名 | 機能名 | 内容 | Ver. |
|---|---|---|---|
| M+IAIStartHomePositioning_F | 原点復帰 | 原点復帰を実行します。 | 00 |
| M+IAIJogInching_F | JOG/インチング動作 | JOG/インチング運転を行います。 | 00 |
| M+IAIReadPositioningTable_F | ポジションテーブル読出し | 指定したポジションテーブルデータを読み出します。 | 00 |
| M+IAISetPositioningTable_F | ポジションテーブル設定 | 指定したポジションテーブルデータの設定を行います。 | 01 |
| M+IAIStartPositioning_F | 位置決め運転 | 位置決め運転の始動を行います。 | 00 |
| M+IAIMonitoring_F | 動作モニタ | 現在位置,アラームなどの監視やアラームリセットを行います。 | 00 |
| M+IAIServoContorol_F | サーボON/OFF | サーボのON/OFFを制御します。 | 00 |
サンプルプロジェクト
| プロジェクト名 | 機能名 | 内容 | Ver. |
|---|---|---|---|
| iQ-F_GT27_IAI.gx3 | iQ-F用サンプルプロジェクト | iQ-F CPUに接続している株式会社アイエイアイ ロボシリンダーに対して、アクチュエーターの現在値や設定値のモニタ、変更を行うサンプルプロジェクトです。 | 01 |
| iQ-F_GT27_IAI_Ver1_J.GTX | GOT2000用サンプルプロジェクト | 上記iQ-F用サンプルプロジェクトを操作するためのサンプル画面(日本語)です。 | 01 |
| iQ-F_GT27_IAI_Ver1_E.GTX | GOT2000用サンプルプロジェクト | 上記iQ-F用サンプルプロジェクトを操作するためのサンプル画面(英語)です。 | 01 | iQ-F_GT27_IAI_Ver1_C.GTX | GOT2000用サンプルプロジェクト | 上記iQ-F用サンプルプロジェクトを操作するためのサンプル画面(中国語)です。 | 01 |

|
|||
位置決め通信プロトコル支援FBライブラリ(アイエイアイ編)Ver.1.02→1.03への改善履歴(2022/04)
| No. | 内容 |
|---|---|
| 1 | マニュアルに2軸を制御するプログラム例を掲載しました。 |
ファイルの使用注意事項
-
以下のツールがインストールされているパソコンにFBライブラリのインストールを行ってください。
- GX Works3 Version 1.060N以降
-
サンプルプロジェクトは以下のツールで使用してください。
- GX Works3 Version 1.080J以降
- GT Designer3 Version 1.260W以降
MELSOFT Libraryの使用方法
- プロジェクトメニューより、[ライブラリ操作]-[ライブラリ一覧に登録]-[ライブラリ]を選択します。
- [ライブラリをライブラリ一覧に登録]ダイアログにて、ダウンロードしたライブラリを選択して[OK]ボタンを押下します。
- 部品選択ウィンドウから取得したFBをプログラムに貼り付けます。
MELSOFT Libraryの使用注意事項
- MELSOFT LibraryのFBライブラリをシステムへ流用するときは、対象システムにおいて、制御に問題がないことを十分検証してください。