シーケンサ MELSEC iQ-Rシリーズ 特長 CPU

モーションCPU
シーケンサCPUユニットとモーションCPUユニットのマルチ構成で、CPUの負荷を効率よく分散できます。
高速シーケンス制御と高精度モーション制御を両立し、装置の高速・高精度化に貢献します。

インタフェース

特長<sup>高応答・大容量のデータ連携で多品種生産に柔軟対応</sup>
- 大容量データ通信
- Gコード
- シーケンサCPUとモーションCPUによるマルチCPU構成により、高速かつ大容量の共有メモリ通信が可能です
- カムデータなどの大容量データも一度に転送できるため、プログラムの作成や変更が効率的に行えます
- 変種変量生産において、コンピューターからの生産指示に応じて製品のレシピをモータの駆動内容に即座に反映できます
- ビジョンシステムと連携したアライメント制御やGコード解析による切削加工など多彩なアプリケーションに活用できます
視覚的にわかりやすく柔軟なモーション制御プログラム
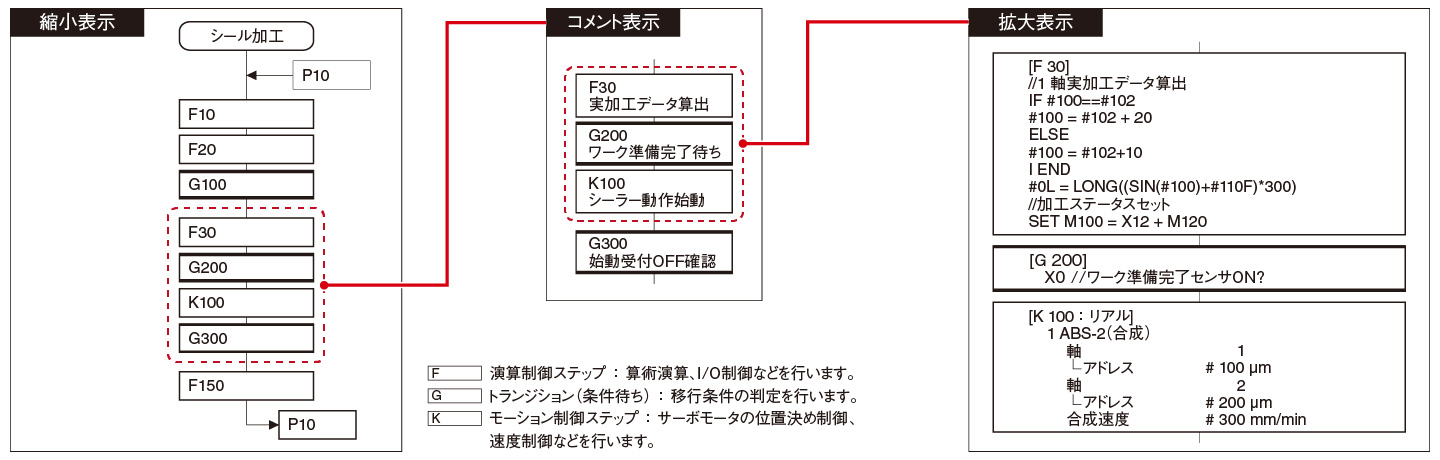
- フローチャート形式
- イベント応答性
- モーション制御プログラムは、フローチャート形式のモーションSFC*1で記述できます
- 処理の流れが視覚的に把握しやすいため、保守性が高く、設備変更にも柔軟に対応できます
- モーションSFCにより、高いイベント応答性を実現でき、装置やライン制御において安定した動作が可能です
- *1.SFC:Sequence Function Chart
モーションSFCプログラムの記述
性能仕様
モーションCPUユニット性能仕様
MT SFC:モーションSFCINS:専用命令
| 項 目 | R16MTCPU | R32MTCPU | R64MTCPU |
|---|---|---|---|
| 最大制御軸数[軸] | 16 | 32(16軸×2系統) | 64(32軸×2系統) |
| 演算周期設定[ms] | 0.222、0.444、0.888、 1.777、3.555、7.111 |
0.222、0.444、0.888、 1.777、3.555、7.111 |
0.222、0.444、0.888、 1.777、3.555、7.111 |
| プログラム言語 | MT SFCINS |
MT SFCINS |
MT SFCINS |
| サーボプログラム容量[ステップ] | 64K | 64K | 64K |
| 位置決め点数[ポイント] | 6400(間接指定可能) | 6400(間接指定可能) | 6400(間接指定可能) |
| サーボアンプ接続方式 | SSCNETⅢ/H(1系統) | SSCNETⅢ/H(2系統) | SSCNETⅢ/H(2系統) |
| 最大局間距離[m] | 100 | 100 | 100 |
| 補間機能 | |||
| 直線補間[軸] | 最大4 | 最大4 | 最大4 |
| 円弧補間[軸] | 2 | 2 | 2 |
| ヘリカル補間[軸] | 3 | 3 | 3 |
| 制御方式 | |||
| 位置決め制御 | ● | ● | ● |
| 連続軌跡制御 | ● | ● | ● |
| 位置追従制御 | ● | ● | ● |
| アドバンスト同期制御 | ● | ● | ● |
| 速度・トルク制御 | ● | ● | ● |
| Gコード制御*2 | ● | ● | ● |
| 加減速処理 | |||
| 台形加減速 | ● | ● | ● |
| S字加減速 | ● | ● | ● |
| アドバンストS字加減速 | ● | ● | ● |
| インタフェース | |||
| PERIPHERAL I/F | ● | ● | ● |
| SDメモリカード | ● | ● | ● |
| 機能 | |||
| 絶対位置システム*3 | ● | ● | ● |
| マーク検出機能 | ● | ● | ● |
| デジタルオシロ機能 | ● | ● | ● |
| ドライバ間通信機能 | ● | ● | ● |
- *2.Gコード制御アドオンライブラリ(有償)を追加インストールすることにより、Gコード制御に対応します。
- *3.サーボアンプにバッテリーを装着することで対応できます。バッテリーレス絶対位置エンコーダ搭載のサーボモータを使用する場合はバッテリー不要です。