シンプルモーションボード 特長

MR-EM340GF

コンセプト
シンプルモーションボードは、PCI ExpressR対応のパソコンに組み込むことにより、位置決め制御、同期制御、速度・トルク制御などの豊富なモーション制御を実現します。
- 一つのネットワークで、サーボアンプ、I/O、高速カウンタなど様々なフィールド機器を自由に接続できます。
- CC-Link IEフィールドネットワークのマスタ局としての機能を搭載しています。
- PCI ExpressR経由の割込み機能により、Visual C++Rでイベントドリブン方式のプログラミングが可能です。

パソコン環境で、
豊富なモーション制御を実現
簡単プログラミング&
エンジニアリングソフトウェア
でデバッグ効率アップ
先進のコンポーネント群を、
ひとつのネットワークに。
適用例
機械に最適な制御や機能を選択することで、最適なソリューションを実現できます。

CC-Link IEフィールドネットワーク

All-in-Oneネットワーク

一つのネットワークでつながる
CC-Link IE フィールドネットワーク
CC-Link IE フィールドネットワークは、モーション制御に必要な同期性とEthernetの汎用性を両立させたネットワークです。
一つのネットワークで、サーボアンプ、I/O、高速カウンタなど様々なフィールド機器を自由に接続できます。
CC-Link IE フィールドネットワークを採用することにより、柔軟性のあるサーボシステムを構築することができ、更なるグレードアップを可能とします。
All-in-Oneエンジニアリングソフトウェア

一つのエンジニアリングソフトウェアで簡単に設定、診断
エンジニアリングソフトウェアは、多彩な新機能と技術を備えた、簡単で使いやすいツールになっています。
シンプルモーションボードのパラメータ設定からサーボ調整、デバッグまで様々なシーンを一つのエンジニアリングソフトウェアのみで対応できます。
サーボ制御に同期した入出力
サーボ指令通信周期にあわせて、同期エンコーダ値、シートの張力値、印字データなど様々な入出力ができるため、モーション制御の幅が広がります。
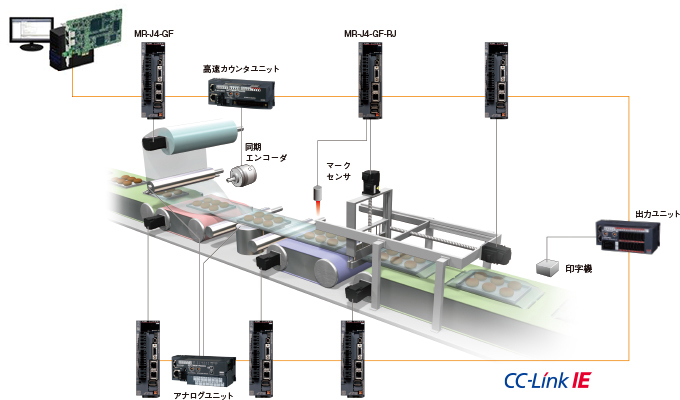
【サーボアンプ指令通信周期に同期した入出力例】
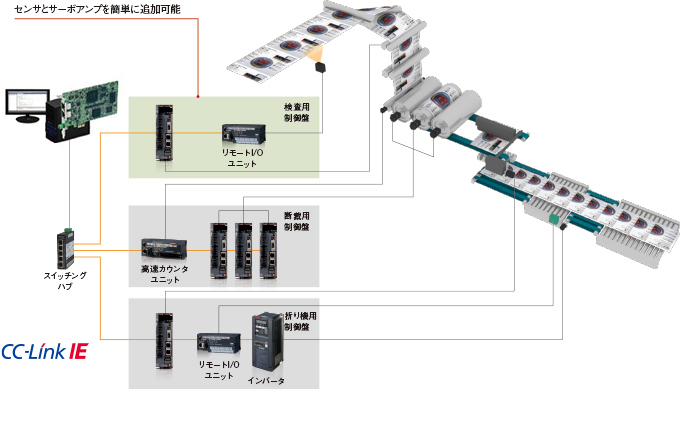
柔軟なネットワーク配線
スイッチングハブを接続することにより、スター型、ライン型、スター・ライン型混在のネットワーク構築を設定レスで変更できます。スイッチングハブの空きポートにケーブルをつなぐだけでの簡単配線で、より自由にフィールド機器を設置できます。
豊富なモーション制御
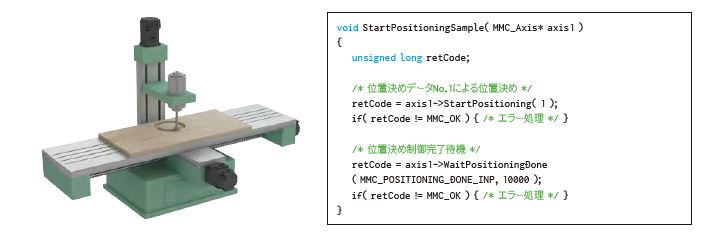
位置決め制御
- 直線補間、2軸円弧補間、定寸送り、および連続軌跡など、豊富な制御で様々な用途に対応できます。
- APIライブラリで位置決めアドレス、速度などを設定することにより、簡単に自動運転ができます。
- Mコード、スキップ、速度変更、目標位置変更などの充実した補助機能を搭載しています。
■ヘリカル補間
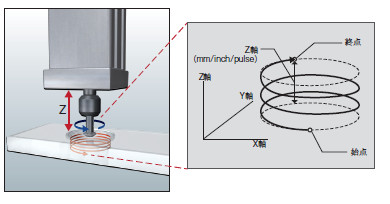
2軸円弧補間制御に直線補間軸(直線制御)が追従することで螺旋の軌跡を描く制御です。
大きな穴をあけるボーリング用途では、X、Y、Zの3軸でヘリカル補間をします。
- フライス加工により、必要とするサイズの穴をXY軸方向に円弧状に開けます。
- 穴の深さはZ軸に沿って、切出位置の偏差を最小限に留めながら、精度の高い加工が可能です。
■ブロック始動
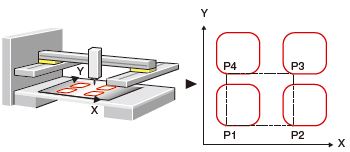
1回の始動で、複数の位置決めデータ群にしたがって順次運転します。 同じ軌跡を何度も繰り返す場合などに使用することができます。
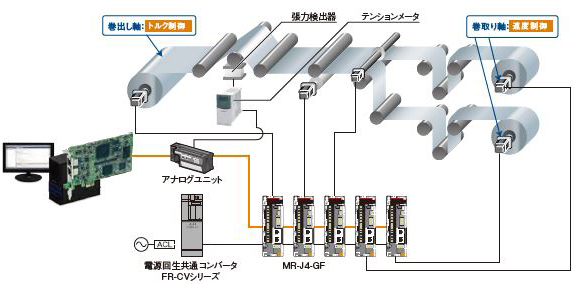
速度・トルク制御
速度制御は速度指令に追従して速度を一定に制御し、トルク制御は指令トルクに追従してトルクを一定に制御します。
巻出し、巻取りなどの速度・トルク制御にも、シンプルモーションボードを使用することができます。
速度・トルク制御中も現在位置管理を実施しているため、位置制御に戻した後も絶対位置座標での位置決めが可能です。
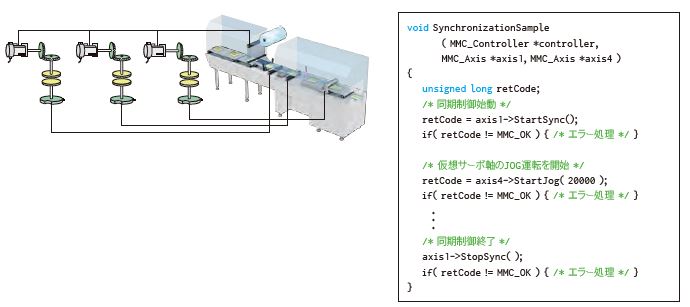
アドバンスト同期制御
ギア、シャフト、クラッチ、変速機、カムなどの機械機構をソフトウェアに置き換えた同期制御が可能です。カム自動生成機能によりカム生成を簡単に実現します。軸ごとに同期制御の始動、停止ができ、同期制御軸と位置決め制御軸の混在が可能です。
■カム自動生成
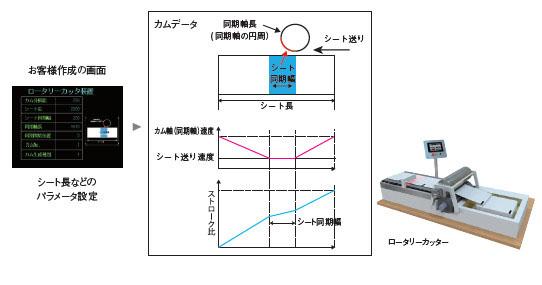
パラメータを設定するだけで、ロータリーカッター用カムデータを自動生成できます。
シート長、同期幅、カム分解能などを入力するだけで、カムデータを簡単に作成できます。
ダイレクト制御
ユーザプログラムからセットされた演算周期ごとの位置指令をサーボアンプに送信して、サーボアンプをダイレクトに制御する機能です。
- ダイレクト制御は位置決め制御と混在して制御できます。
- ダイレクト制御と位置決め制御を切り換えて制御できます。
- パソコンにリアルタイムOS を採用することで、演算周期割込みを使用した定周期のモーション制御が可能です。
- 最大16段の位置指令バッファにより、OSが非リアルタイムOS(Windows)でも最短0.5ms周期での指令ができ、軌跡制御の高精度化が可能です。
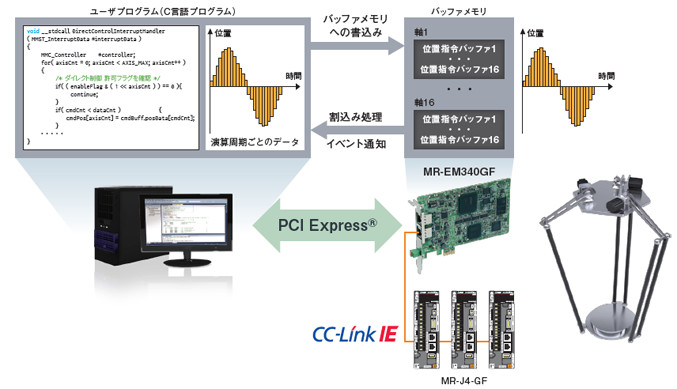
- ※1 : パラレルリンクロボットの各軸の座標変換は、ユーザプログラムにて実施してください。
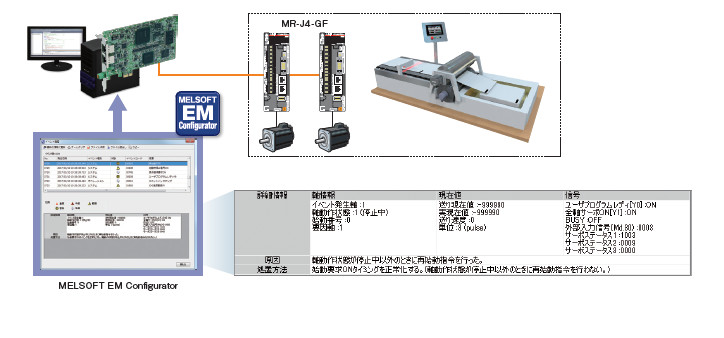
イベント履歴
各リモート機器、サーボアンプで発生したイベントをシンプルモーションボードに格納することができます。
プログラム書込み操作、エラー発生等の情報が時系列で一覧として表示されるため、トラブル発生時の原因調査、サーボアンプ復旧対応を迅速に行うことができます。
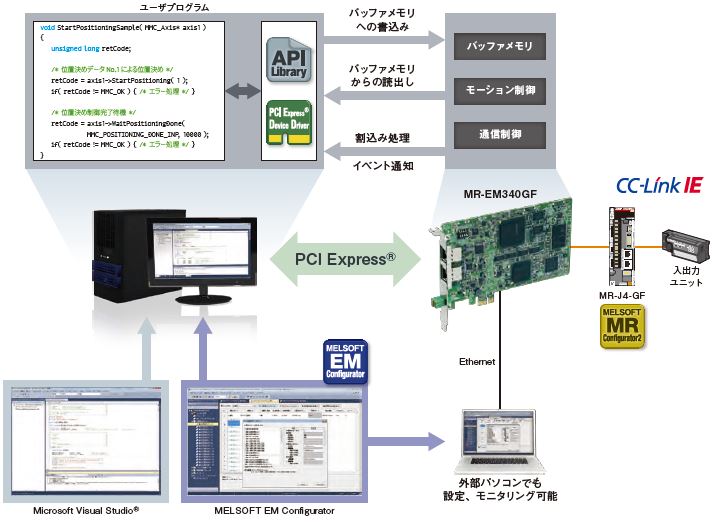
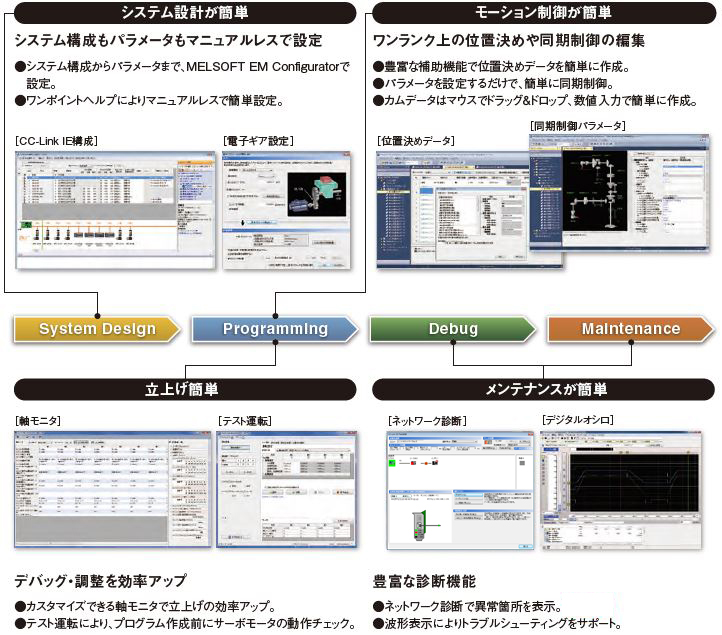
ソフトウェア開発キット MELSOFT EM Software Development Kit
MELSOFT EM Software Development Kitは、シンプルモーションボードのシステム設計・プログラミングから、デバッグ、保守まで、すべてのシーンに対応できるソフトウェア開発キットです。
MELSOFT EM Configurator
システム設計・プログラミングからデバッグ、保守まで、すべてのシーンに対応できます。
MELSOFT MR Configurator2
サーボアンプと接続してサーボ調整、モニタ、診断などを簡単に行うことができます。
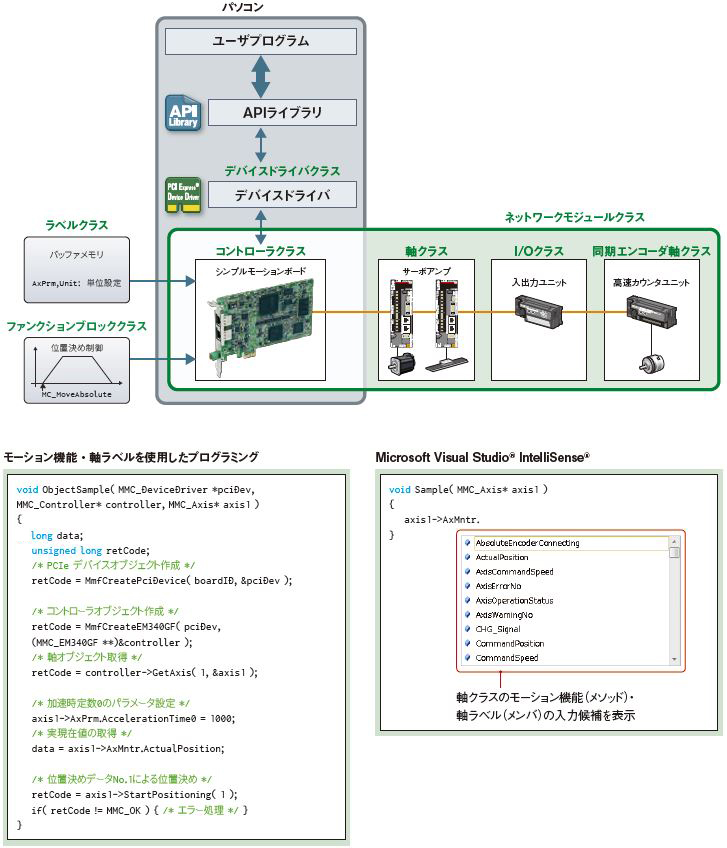
APIライブラリ
コントローラクラスや軸クラスなどの機能(メソッド)・ラベル(メンバ)を使用して、簡単にVisual C++Rでプログラミングができます。
PCI ExpressRデバイスドライバ
ユーザプログラムからPCI ExpressR経由で、シンプルモーションボードにアクセスするソフトウェアです。
最新のソフトウェア開発キットは三菱電機FAサイトよりダウンロードできます。
開発環境、デバッグ環境
Microsoft Visual StudioRのプロジェクトに、モーション制御用APIライブラリを追加してユーザプログラムを作成します。
リアルタイムOS(INtimeR,RTX)に対応。
- ※1 : 詳細については、営業窓口にお問い合わせください。
注: OSおよび開発環境はお客様にて準備してください。
MELSOFT EM Configurator(シンプルモーションボード設定ツール)
APIライブラリ(C++モーションクラスライブラリ)
APIライブラリでは、コントローラクラスや軸クラスなどの機能(メソッド)・ラベル(メンバ)を使用してプログラミングを行います。
- クラスライブラリにより、可読性の高いプログラミングを実現します。
- Microsoft Visual StudioRのIntelliSenseR活用により、コーディング時間を短縮します。
- 割込み機能の条件に任意のビット・データを指定し、イベントドリブン方式のプログラミングとの親和性を向上します。
- PLCopenR Motion Control FBの仕様にあわせ、スキャン処理に適したライブラリを準備しています。
[APIライブラリで使用するクラスの概念図]
CC-Link IEフィールドネットワーク対応 サーボアンプMR-J4-GF

シンプルモーションボードと組み合わせて、最適なソリューションを実現し、生産性向上に貢献します。
- 業界をリードする基本性能
業界最高レベルの基本性能により、装置の高タクト化に貢献します。 - 高度なサーボゲイン調整を簡単に実現
先進の振動抑制機能を手軽に駆使することで、マシンの性能を最大限に発揮させます。 - 幅広い容量・シリーズをラインアップ
回転型サーボモータからリニアサーボモータ、ダイレクトドライブモータまで幅広く対応し、装置のパフォーマンスを大幅に向上できます。 - 予防保全
ネットワーク経由でサーボアンプの情報を読み出すことができ、機械診断などの予防保全に役立ちます。
■制御モード
複数軸の位置決め、同期制御など幅広いモーション制御ができるモーションモードと、1軸での位置決めができるI/Oモードがあり、用途により使い分けができます。
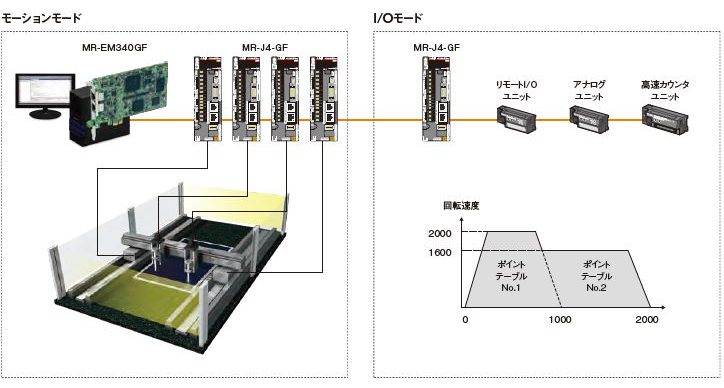
シンプルモーションボードと組み合わせることで、複数軸の位置決め、同期制御、速度・トルク制御などの高度なモーション制御ができます。
サーボアンプに内蔵している位置決め機能を使って、ベルトコンベア、回転テーブル、ボールねじなどを簡単に駆動できます。
機能一覧
| シンプルモーションボード | |||||
|---|---|---|---|---|---|
| MR-EM340GF | |||||
| 最大制御軸数 (仮想サーボアンプ軸を含む) |
16軸 | ||||
| サーボアンプ接続方式 | CC-Link IE Field (1Gbps) | ||||
| サーボアンプ間の 最大接続距離[m] |
100 | ||||
| 接続サーボアンプ | MR-J4-GF , MR-J4-GF-RJ | ||||
| 演算周期[ms] | 0.5, 1.0,2.0,4.0 | ||||
| エンジニアリング環境 | MELSOFT EM Software Development Kit | ||||
| 制御方式 | 位置決め制御、軌跡制御(直線,円弧,ヘリカルとも設定可)、速度制御、速度・トルク制御 | ||||
| 制御単位 | mm,inch,degree,pulse | ||||
| 位置決めデータ数 | 600データ(位置決めデータNo.1~600)/軸 | ||||
| 加減速方式 | 台形加減速、S字加減速 | ||||
| 手動制御 | JOG運転、手動パルサ運転、インチング運転 | ||||
| 拡張制御 | ダイレクト制御 | ||||
| 制御内容を変更する機能 | 現在値変更、目標位置変更機能、トルク制限値変更、速度変更、オーバーライド機能、加減速時間変更機能 | ||||
| 原点復帰方式 | ドライバ原点復帰 | ||||
| 補助機能 | 緊急停止機能、H/Wストロークリミット機能、S/Wストロークリミット機能、絶対位置システム、 アンプなし運転機能、無限長送り機能、任意データモニタ機能、マーク検出機能、 フラッシュROMバックアップ、 Mコード出力機能、イベント履歴、 デジタルオシロ機能、カム自動生成機能 |
||||
| 入出力占有点数 | 32点(I/O割付:インテリジェント機能ユニット32点) | ||||
| 消費電流[A] | DC12V | 0.4 | |||
| DC3.3V | 0.6 | ||||
| 質量[kg] | 0.13 | ||||
CC-Link IEフィールドネットワーク性能仕様
| シンプルモーションボード | |||
|---|---|---|---|
| MR-EM340GF | |||
| 1ネットワークあたりの 最大リンク点数 |
RX | 16k点(16384点, 2kバイト) | |
| RY | 16k点(16384点, 2kバイト) | ||
| RWr | 8k点(8192点, 16kバイト) | ||
| RWw | 8k点(8192点, 16kバイト) | ||
| 1局あたりの 最大リンク点数 |
マスタ局 | RX | 16k点(16384点, 2kバイト) |
| RY | 16k点(16384点, 2kバイト) | ||
| RWr | 8k点(8192点, 16kバイト) | ||
| RWw | 8k点(8192点, 16kバイト) | ||
| ローカル局 | RX | 2k点(2048点, 256バイト) | |
| RY | 2k点(2048点, 256バイト) | ||
| RWr | 256点, 512バイト | ||
| RWw | 256点, 512バイト | ||
| インテリジェント デバイス局 |
RX | 2k点(2048点, 256バイト) | |
| RY | 2k点(2048点, 256バイト) | ||
| RWr | 256点, 512バイト | ||
| RWw | 256点, 512バイト | ||
| リモート デバイス局 |
RX | 128点, 16バイト | |
| RY | 128点, 16バイト | ||
| RWr | 64点, 128バイト | ||
| RWw | 64点, 128バイト | ||
| Ethernet部 | 通信速度 | 1Gbps | |
| 接続ケーブル | 1000BASE-Tの規格を満たすEthernetケーブル ※1 :カテゴリ5e 以上 (二重シールド付・STP)ストレートケーブル |
||
| 最大局間距離[m] | 最大100(ANSI/TIA/EIA-568-B(Category 5e)に準拠 | ||
| 伝送路形式 | ライン型, スター型(ライン型とスター型の混在も可能) | ||
| 総延長距離 | ライン接続時[m] | 12000(マスタ局1台, リモート局120台接続時) | |
| スター接続時 ※2 | システム構成による | ||
| 1ネットワークあたりの最大接続局数 | 121台(マスタ局1台, リモート局120台) | ||
| 最大ネットワーク数 | 239 | ||
- ※1 : CC-Link IEフィールドネットワークの配線には、CC-Link 協会の推奨配線部品を使用してください。
CC-Link IEフィールドネットワークには、CC-Link IEコントローラネットワーク用のケーブルは使用できません。 - ※2 : スター型配線の場合、スイッチングハブが必要です。