モーションコントロールボード 特長

MR-EM441G

特長
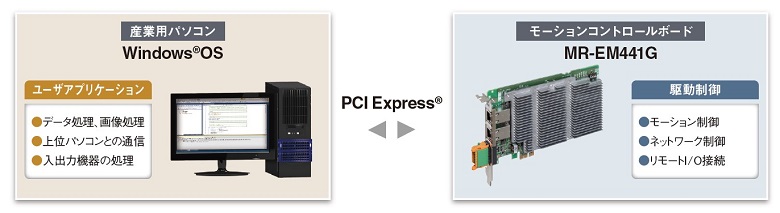
モーションコントロールボードMR-EM441GはサーボアンプMR-J5-Gを制御するパソコン組込み型サーボシステムコントローラです。
産業用パソコンのPCI Express®拡張スロットに接続し、高速高精度なモーション制御を実現します。
高速高精度を追求したモーション制御
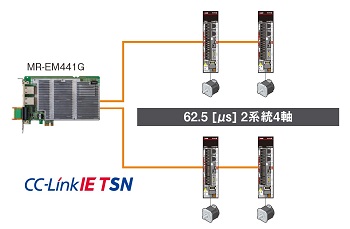
62.5 μs/4軸制御 *1,2
最小演算周期62.5 μsで4軸制御が可能です。
ヘッド部の高速処理に最適です。
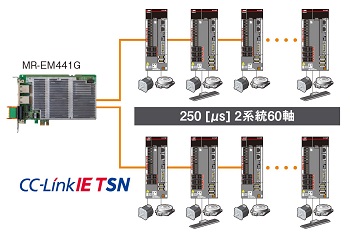
250 μs/60軸制御 *3
最小演算周期250 μsで60軸制御が可能です。
軸数の多い装置でもタクトタイム短縮が図れます。
- *1 : 高速演算モードで全軸に台形指令を実行する場合です。
- *2 : 62.5 μsで使用する場合、一部機能は使用できません。
- *3 : MR-J5W_-Gのみ接続し、高速演算モードで全軸に台形指令を実行する場合です。
パソコンとモーションコントロールボードで負荷分散
高性能CPUを内蔵し、複雑かつ高速性を要求されるモーション制御を実行しています。
このため、膨大なデータ処理などでパソコンのCPUが高負荷となった場合でも、モータ駆動に影響を与えることはなく、高速高精度の位置決めを実現します。
機能
位置決め制御
速度、移動量などの位置決めデータを各ポイントデータに設定し、開始ポイント番号から終了ポイント番号まで位置決め制御を実行します。
ポイントデータの設定、運転起動はモーションAPIを使用します。
高速演算モードの場合、直線補間グループ、円弧補間グループ、並列駆動グループの組合せに制約があります。
応用機能
ジャーク比率加減速
なめらかに加速する区間と最大加速度を保持する区間を設定します。
これにより、なめらかさを維持しつつ、加速時間を短縮できます。
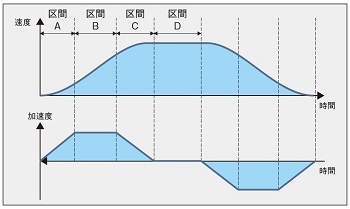
- 区間A:なめらかに加速する区間
- 区間B:最大加速度で加速する区間
- 区間C:なめらかに加速する区間
- 区間D:定速区間
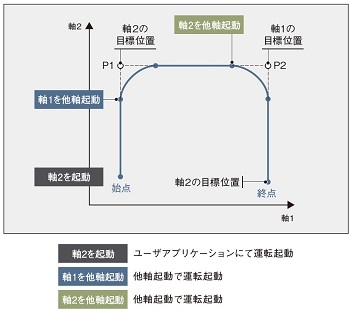
他軸起動
他軸起動は、ユーザアプリケーションではなくMR-EM441Gで内部的に運転起動する機能です。
自軸の指定位置で他軸を運転起動することができ、タクトタイム短縮を図れます。
他軸の起動条件や動作内容をあらかじめ設定する必要があります。
他軸の起動条件が成立したとき、出力信号をオン/オフすることもできます。
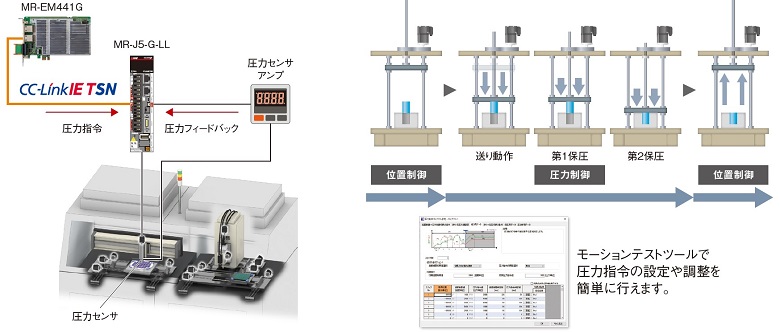
圧力制御
圧力制御は圧力指令と圧力センサ値が一致するように制御し、負荷が変動しても圧力を一定に保持できます。
圧力制御対応サーボアンプMR-J5-G-LLと組み合わせて、送り、保圧、圧抜きによる高度な圧力制御を実現します。
最大16軸の同時圧力制御が可能です。
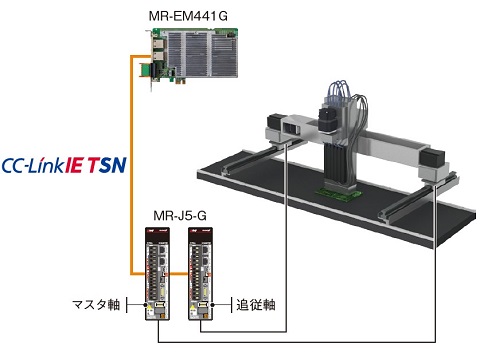
並列駆動
並列駆動は、並列駆動グループに設定された2つの軸 (マスタ軸、追従軸) が全く同じ位置決め運転するように制御する機能です。
ガントリ機構など機械的に結合された2つのモータで一つの機械を駆動する場合に使用します。
ポイントデータの設定や運転起動などはマスタ軸に対して行います。
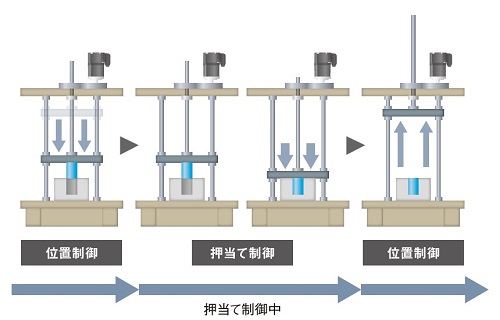
押当て制御
押当て制御は、現在位置管理しながら指令トルクに追従してトルクを一定に制御します。
位置決め制御からサーボモータを停止せずにスムーズに押当て制御へ切り替えることができます。
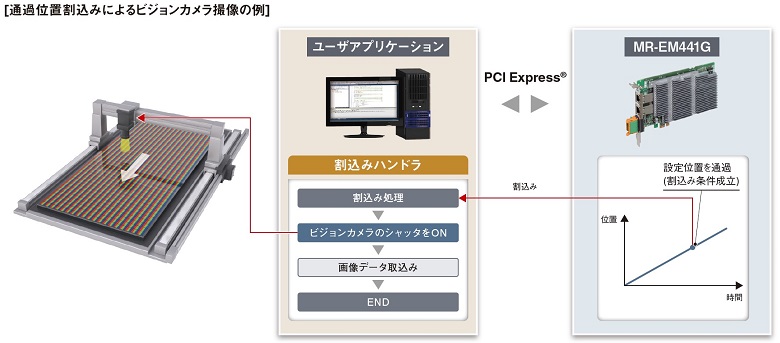
通過位置割込み
通過位置割込みは、設定した位置を通過したときに産業用パソコンへ割込みを発生させる機能です。
運転完了などの信号立上りによる割込みに加え、位置による割込みを活用したユーザアプリケーションを構築できます。
開発環境
MELSOFT EM Motion SDK
MELSOFT EM Motion SDKは、モーションコントロールボードのパラメータ設定から、デバッグ、保守までサポートするソフトウェア開発キットです。
MELSOFT EM Motion SDKは、三菱電機FAサイトからダウンロードが可能です。
アプリケーションの作成
*1
には、Windows®上で動作するモーションAPIを使用します。
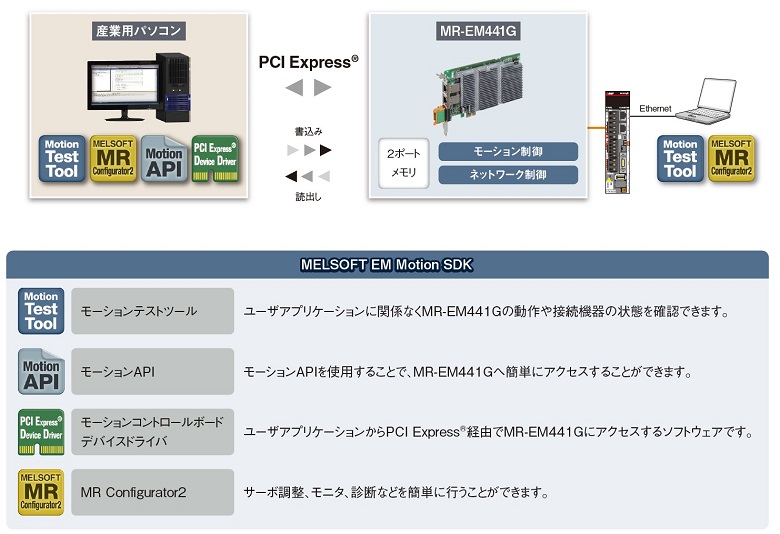
*1: OSおよび開発環境は、お客様にて準備してください。
仕様
制御仕様
| 機能 | 仕様 |
|---|---|
| 最大制御軸数 | 64軸 |
| 最大接続局数 | 120局 |
| 演算周期設定 | 62.5 *1 , 125, 250, 500, 1000, 2000 |
| 演算モード設定 | 高速演算モード, 通常演算モード |
| JOG運転 | あり |
| インクリメンタル送り | あり |
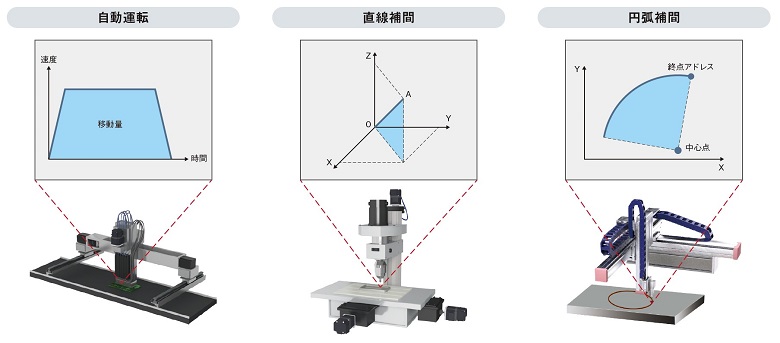
| 自動運転 | ポイントテーブル方式, 1軸制御, 押当て制御, 圧力制御 *2 , 起動条件 |
| 直線補間 | ポイントテーブル方式, 最大4軸 |
| 円弧補間 | ポイントテーブル方式, 2軸 |
| 原点復帰 | ドグ式,データセット式,押当て式,ドグクレードル式,リミットスイッチ兼用式,リミットスイッチ前端式,ドグ前端式,スケール原点信号検出式,スケール原点信号検出式2,ドライバ式 *3 |
| 原点復帰再設定 | あり |
| ダイレクト制御 |
位置制御
指令バッファ数: 最大64個 |
| 電子ギア |
電子ギア分子: 1~5242879
電子ギア分母: 1~589823 |
| 速度単位 | 指令単位/min, 指令単位/s, r/min |
| 加減速 | 直線加減速, スムージングフィルタ, S字加減速, ジャーク比率加減速, 制振指令フィルタ1 |
| 停止機能 | 緊急停止(パラメータにて信号を選択), 運転停止, 運転急停止 |
| 指令変更 | 位置, 速度, 時定数 |
| 応用機能 |
ハードウェアストロークリミット, ソフトウェアストロークリミット, インタロック, 粗一致出力, トルク制限,
指令変更 (位置, 速度, 時定数), バックラッシュ, ポジションスイッチ, 絶対位置検出システム, 他軸起動, 通過位置割込み, 入出力デバイス, 圧力制御 *2 , 押当て制御, 干渉チェック機能など |
| 補助機能 |
パラメータ読出し・書込み, アラーム・システムエラー, モニタ(現在位置, フィードバック位置,
速度指令, 位置ドループ, 電流指令, アラーム番号, 外部信号状態など), 高速モニタ(現在位置, フィードバック位置, 移動速度, フィードバック移動速度, 外部信号, 電流フィードバック, 位置ドループ), 割込み(運転起動, 運転停止時, アラーム発生時(サーボアラーム/運転アラーム)など), ユーザウォッチドグ機能, ソフトウェアリブート機能, サンプリング, 演算周期モニタ機能, サーボアンプ切離し, ファイル管理, 時刻管理, リンクダウン検知機能, イベント履歴, イベント検知機能など |
| 並列駆動 | 最大2軸 × 8グループ |
| ボードID | 0~3 |
- *1 : 62.5 μsで使用する場合、一部機能は使用できません。
- *2 : MR-J5-G-LLと組み合わせてご使用ください。
- *3 : ドライバ (サーボアンプ) に設定された原点復帰方式を使用します。
モーションコントロールボード仕様
| 機能 | 仕様 |
|---|---|
| 最大制御軸数 | 64軸 |
| 最大接続局数 | 121局(マスタ局含む) |
| サーボアンプ接続方式 | CC-Link IE TSN |
| CC-Link IE TSN Class | B, A(プロトコルバージョン2.0) |
| CC-Link IE TSN系統数 | 2系統 |
| 最大局間距離[m] | 100 |
| 周辺装置インタフェース | Ethernet |
| 入力点数 | 4点 |
| 入力応答時間[μs] | 200 |
| 出力点数 | 4点 |
| 出力応答時間[μs] | 1 |
| パソコン1台当たりの接続台数 | 4台 |
| バス仕様 | PCI Express® 2.0 ×1 |
| 使用周囲温度[℃] | 0~55(エアフロー確保のこと) |
| 冷却方法 | 空冷(冷却ファンが必要) |
| 消費電流 |
DC3.3 V±9 % 1.0 A以下
DC12 V±8 % 1.4 A以下 |
| 外形寸法[mm] | ハーフレングス (167.65 × 111.15) |