C言語コントローラインタフェースユニット 特長

Q173SCCF

特長
- パソコンと比較して長期安定供給が可能なC言語コントローラのシステムを有効活用。
- 割込みを使用したイベントドリブン方式でのプログラム作成が可能。
- ポイントテーブル方式の位置決め機能を搭載。
- SSCNETIII/Hヘッドユニットを使用することにより、SSCNETIII/H経由で
I/O、アナログ、高速カウンタユニットなどと接続可能。 - お客様のソフトウェア開発の効率をUPするAPIライブラリを提供。
- Lineo uLinux搭載C言語コントローラに対応。
三菱電機営業窓口にお問い合わせください。

導入メリットQ173SCCFMR-MCシリーズ

構成図

開発環境Q173SCCF
C言語コントローラのソフトウェア開発環境CW Workbenchのプロジェクトに、位置決め制御APIライブラリを追加してユーザプログラムを作成します。 OS(VxWorksR)はセットアップ済みのため、インストール作業は必要ありません。
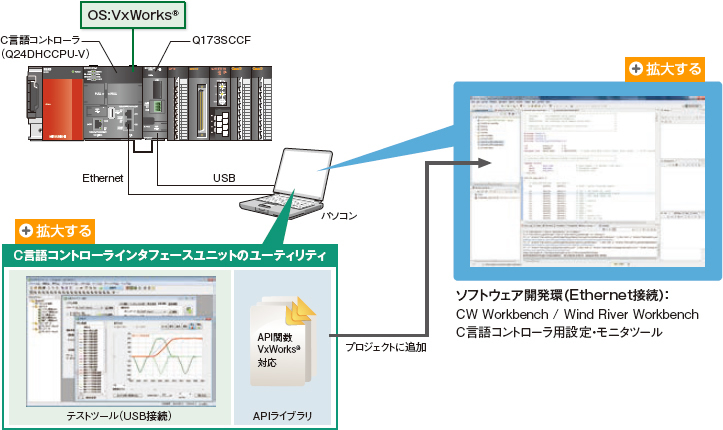
ユーティリティ
C言語コントローラインタフェースのユーティリティには、アプリケーション開発に必要な以下のソフトウェアが含まれます。

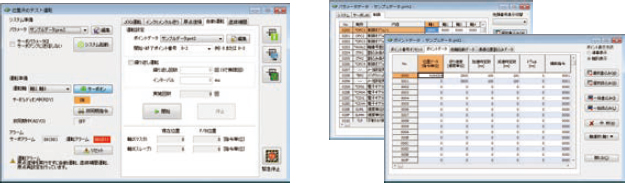
テストツール
アプリケーション開発に必要なパラメータの設定、ポイントデータの設定、サーボ調整などの動作確認、トラブル発生時の調査等に使用します。
また、テストツールからMR Configurator2を起動することができ、サーボアンプの調整などに使用できます。
簡単にテスト動作確認
位置決めテスト運転機能やパラメータ・ポイントデータ設定機能を使用することで、簡単にテスト動作を行うことができます。
SSCNETⅢ/H通信の配線チェックやモータの動作チェックに便利です。
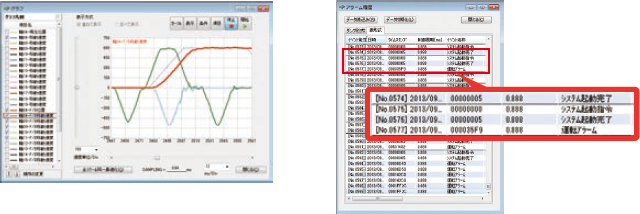
メンテナンス・保守
モニタデータ32項目/ビットデータ16項目のサンプリング波形が確認できますので、ユーザプログラムのシーケンスの確認や起動タイミングの検証ができます。
また、不揮発性メモリに保存されたアラーム履歴を読み出すことで、異常発生した際の解析に便利です。
APIライブラリ
C言語コントローラやパソコン上でアプリケーションを作成するためのAPI関数群です。
サーボアンプの初期化、パラメータの変更、各運転モードによる起動、モニタなどを行うことができます。
デバイスドライバ
ユーザプログラムからPCI Express®/PCIバス経由でC言語コントローラインタフェースユニット/ポジションボードにアクセスするためのソフトウェアです。 お客様にてデバイスドライバを準備いただく必要はありません。
高速同期ネットワーク SSCNETIII/HQ173SCCFMR-MCシリーズ
- データ送受信を従来比3倍の双方向
150Mbps(片方向300Mbps)へと高速化。システムの応答性を飛躍的に向上します。 - 0.22msへと、指令通信周期を高速化
- 同期通信により、装置の高性能化を実現
SSCNETⅢ/Hでは、完全同期通信が可能。高精度な同期が必要な装置の高性能化を実現します。 - 最大1600mの長距離配線に対応
1系統あたり最大1600m(局間最大100m×16軸)の長距離配線が可能 - SSCNETⅢ/H対応品とSSCNETⅢ対応品との混在が可能
同一系統にSSCNETⅢ/H対応サーボアンプとSSCNETⅢ対応サーボアンプを混在して使用できます。
(混在時の通信速度:双方向50Mbps)
※SSCNET (Servo System Controller Network)
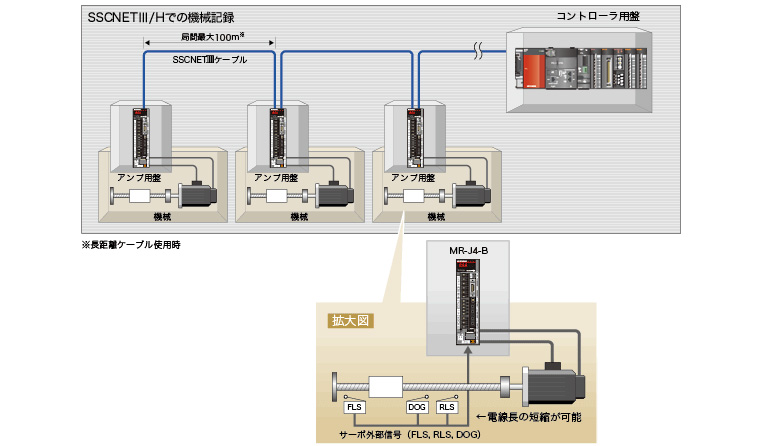
SSCNETIII/H ヘッドユニット LJ72MS15Q173SCCFMR-MCシリーズ
SSCNETⅢ/Hヘッドユニットを使用することで、SSCNETⅢ/H経由でI/O、アナログ、高速カウンタなど、多彩な機能ユニットと接続可能です。
これらのユニットをモーションコントローラのリモート局として入出力できます。
サーボアンプ側の制御盤から、直接、入出力信号、アナログ入出力信号などを取り込むことができ、省配線につながります。
注: ヘッドユニットを設定するには、MELSOFT GX Works2が必要です。
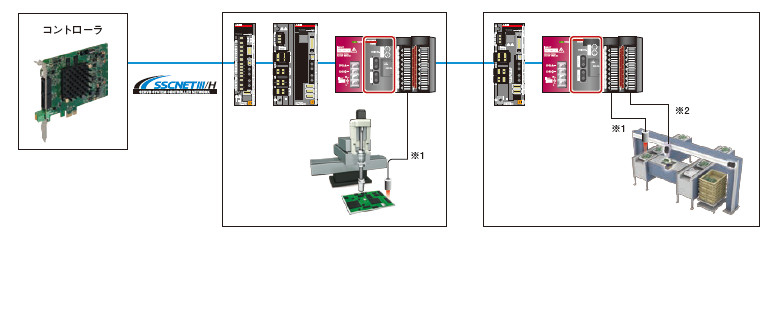
- ※1: 検査装置などに使用されるセンサの入出力信号をヘッドユニット経由で読み書きできます。
- ※2: ハンド開閉用信号を出力します。
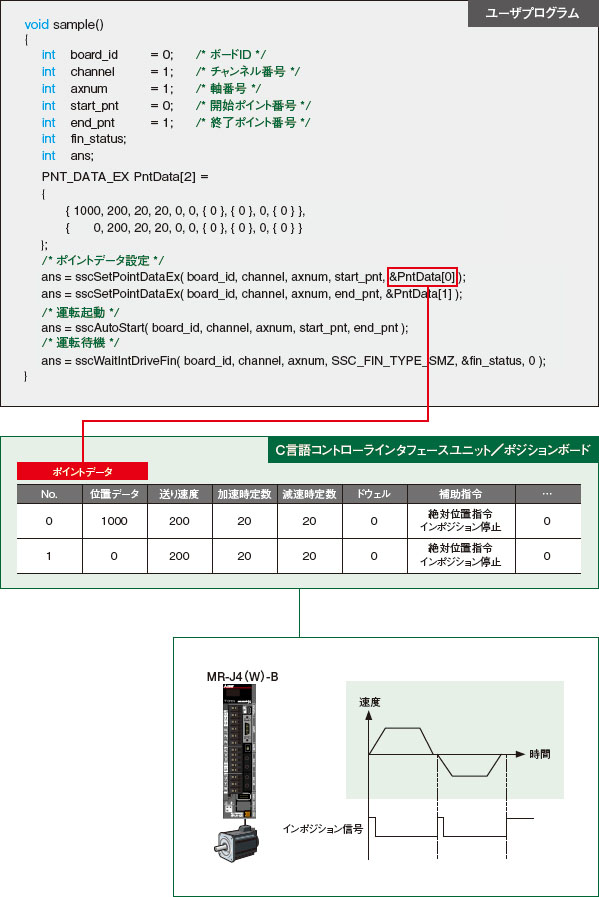
位置決め制御Q173SCCFMR-MCシリーズ
C言語で作成したユーザプログラムからAPI ライブラリを使用して位置決め運転を行います。
ポイントテーブルに設定された位置決めデータで運転を開始し、割込みによるイベント発生まで待機します。
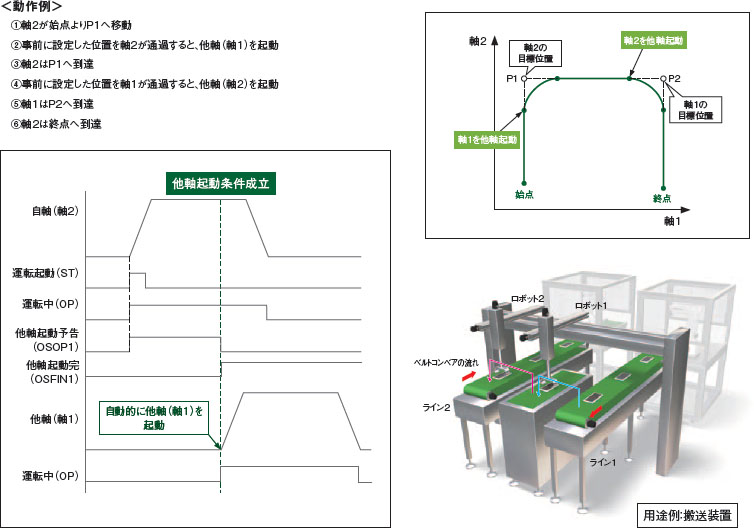
他軸起動機能Q173SCCFMR-MCシリーズ
他軸起動機能は他軸起動条件および、他軸動作内容に基づき、自動で他軸の運転起動を行う機能です。
コントローラで自動的に軸起動をするため、搬送装置などでタクトタイム短縮が図れます。
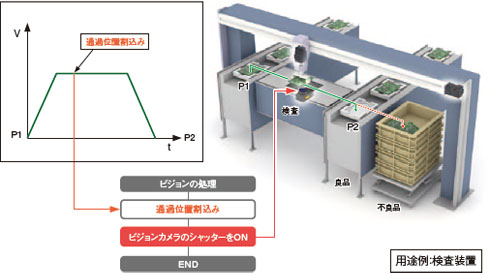
通過位置割り込み機能Q173SCCFMR-MCシリーズ
自動運転中に、設定した位置を通過したとき、割込みを出力する機能です。
割込みが発生すると、ユーザプログラムの対応する割込み処理が起動されます。
- サーボ軸の位置に応じたホスト側(OS)の高速イベント処理起動が可能です。
- 通過位置データは全軸で合計64ポイントまで指定することができます。
<動作例>
- 1.P1からP2へ移動中に通過位置割込みが発生
- 2.割込み処理にてビジョンカメラのシャッターをON
- 3.ビジョンカメラの位置データを取り込み
割込み処理でビジョンカメラのシャッターをONすることにより、シャッターの遅れ時間のばらつきを小さくでき、高精度の位置データを取り込むことができます。
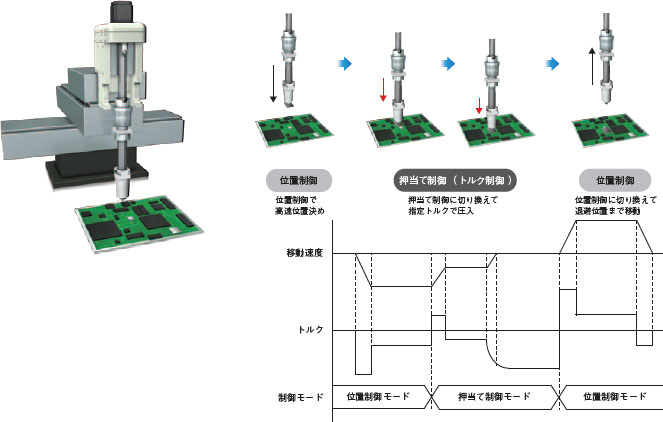
押当て制御 Q173SCCFMR-MCシリーズ
位置制御から停止することなくスムーズに押当て制御モードに切換えることができます。
押当て制御中も現在位置管理をしているので、位置制御に戻した後も、絶対位置座標での位置決めが可能です。
インタフェースモード機能Q173SCCFMR-MCシリーズ
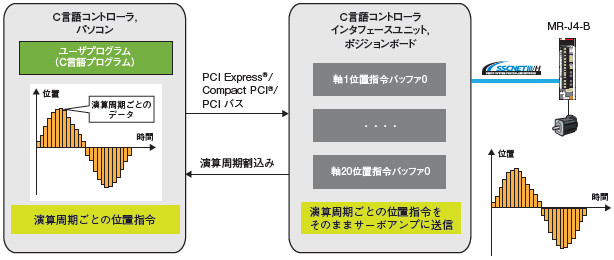
お客様独自のモーション制御をSSCNETⅢ/Hで実現できるインタフェースモードを標準搭載
ユーザプログラムからセットされた演算周期ごとの位置指令をそのままサーボアンプに送信し、サーボアンプをダイレクトに制御する機能です。
位置制御だけでなく、速度制御、トルク制御に対応しています。
お客様の位置・速度・トルクの指令生成ノウハウとSSCNETⅢ/Hの高速同期性を活かしたサーボアンプMR-J4-B の制御が可能です。
- SSCNETⅢ/Hの処理は当社C言語コントローラインタフェースユニット、ポジションボードが制御するため、ユーザプログラム側は情報処理、 マンマシンインタフェース、モーション制御に特化できます。
- パソコンにリアルタイムOSを採用することで、演算周期割込みを使用した定周期のモーション制御が可能です。
- 最大64段の位置指令バッファにより、OSが非リアルタイムOS(Windowsのみ)でも最短0.22ms周期での指令ができ、軌跡制御の高精度 化が可能です。
機能一覧
| 標準モード | インタフェースモード | |||||
|---|---|---|---|---|---|---|
| Q173SCCF | Q173SCCF | |||||
| 最大制御軸数 | 20軸 | 標準モードと同じ | ||||
| 制御周期[ms] | 0.22,0.44,0.88(パラメータにより選択) | |||||
| ソフトウェア開発環境 | CW Workbench/, Wind River Workbench, C言語コントローラ用設定・モニタツール |
|||||
| サーボアンプ接続方式 | SSCNETⅢ/H | |||||
| サーボアンプ間の最大接続距離[m] | 100 | |||||
| 接続サーボアンプ | MR-J4(W)-B | |||||
| JOG運転 | あり | - | ||||
| インクリメンタル送り | あり | - | ||||
| 自動運転 | ポイントテーブル方式,1軸制御,押当て制御 | - | ||||
| 直線補間 | ポイントテーブル方式,最大4軸の補間制御※1 | - | ||||
| 原点復帰 | ドグクレードル式, ドグ式, ドグ前端式, データセット式, 押当て式, Z相検出式, リミットスイッチ兼用式, リミットスイッチ前端式, スケール原点信号検出式, スケール原点信号検出式2 |
- | ||||
| 電子ギア | 電子ギア分子:1~5242879 電子ギア分母:1~589823 |
- | ||||
| 速度単位 | 指令単位/min,指令単位/s,r/min | 指令単位/min,指令単位/s,r/min (モニタ出力時の速度単位) |
||||
| 加減速方式 | 直線加減速,スムージングフィルタ, 起動速度, S字加減速(サイン加減速) |
- | ||||
| 停止機能 | 緊急停止,運転停止,運転急停止 | 緊急停止 | ||||
| 指令変更 |
位置変更 |
- | ||||
| 応用機能 | H/Wストロークリミット,S/Wストロークリミット, インタロック,粗一致出力,トルク制限, バックラッシュ補正,ポジションスイッチ, 干渉チェック※1 ゲイン切換え,PI-PID切換え,絶対位置検出システム, 原点復帰要求,他軸起動,デジタル入出力, サーボアンプ汎用入出力,通過位置割込み, 並列駆動 |
トルク制限,ゲイン切換え,PI-PID切換え, 絶対位置検出システム,デジタル入出力, サーボアンプ汎用入出力,マーク検出, イベント検出 |
||||
| 補助機能 | モニタ,高速モニタ,割込み,ユーザウォッチドグ,パラメータバックアップ,テストモード, 切断・再接続,サンプリング,ログ,アラーム履歴,外部緊急停止無効 |
|||||
| 質量[kg] | 0.17 | 標準モードと同じ | ||||
- ※1:制御周期0.22ms時は使用できません。