モーションユニット特長(シンプルモーションモード)



- ●ポイントテーブル方式で簡単に位置決め制御が可能です。同期制御はパラメータを設定するだけで実行できます。
- ●CC-Link IE TSN経由でリモート機器を接続してシーケンサCPUからプログラミングできます。
- ●デジタルオシロを使用してモーション演算周期に同期したデータを収集し、波形表示で動作確認できます。
- ●既存プロジェクトを活用でき、設計工数の短縮ができます。
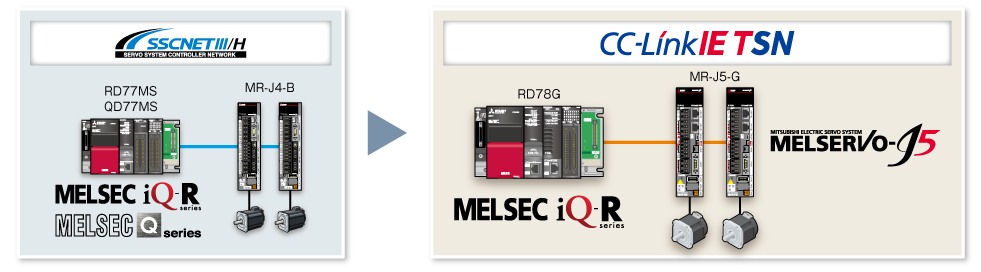
既存製品でご使用のプログラム資産の活用が可能
シンプルモーションモード対応モーションユニットRD78Gは、既存システムで使用しているMELSEC iQ-R/MELSEC-Qシリーズのプログラム、各種ユニットなどの資産が活用できます。
ラインアップ

RD78G4
RD78G8
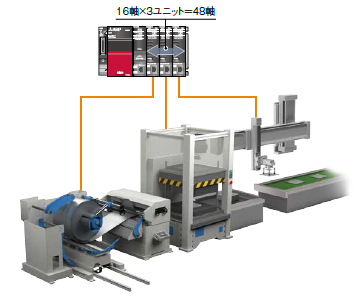
RD78G16
- ●最大制御軸数: RD78G16 16軸/ユニット
- ●最小演算周期*1: 250 [μs]
*1.最小演算周期は機種や制御軸数により異なります。
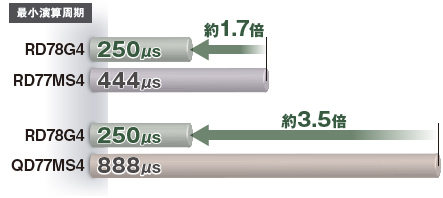
性能
シンプルモーションモードのモーションユニットでは最小演算周期が従来比約1.7~3.5倍速くなり、サーボアンプからのデータ、入出力信号の授受を高速にできます。その結果タクトタイムの短縮に貢献します。
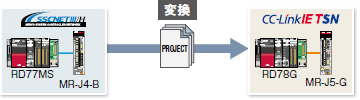
プロジェクト流用
シンプルモーションユニットのプロジェクトを有効活用してプログラムの開発工数の削減と開発期間の短縮ができます。
RD77MS→RD78G
GX Works3のナビゲーションメニューで [ユニット変更] をクリックすることで、シンプルモーションからモーションユニットのプロジェクトに変換できます。
その後、ネットワーク、サーボアンプなどのパラメータを設定します。
QD77MS→RD78G
GX Works3のナビゲーションウィンドウメニューから [シンプルモーションユニットデータのインポート] をクリックすることで、QD77MSのパラメータを流用できます。
その後、ネットワーク、サーボアンプなどのパラメータを設定します。

モーションユニットRD78Gのファームウェア
シンプルモーションモードはモーションユニットのファームウェアバージョン16以降で対応します。
ファームウェアは三菱電機FAサイトよりダウンロードしてインストールできます。
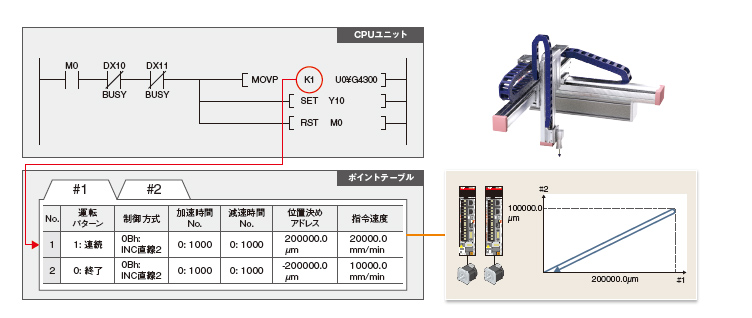
位置決め制御
ポイントテーブル方式で簡単に位置決め制御が可能です。
- ●直線補間、2軸円弧補間、定寸送り、および連続軌跡など、豊富な制御で様々な用途に対応できます。
- ●位置決めアドレス、速度などをシーケンスプログラムから設定して簡単に位置決め制御ができます。
- ●Mコード、スキップ、速度変更、目標位置変更などの充実した補助機能を装備しています。
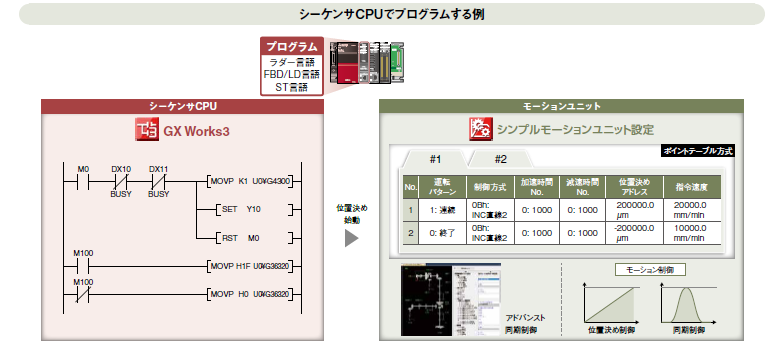
プログラム
シーケンスプログラムからポイントテーブル方式の位置決めデータを始動することにより、簡単に位置決め制御が可能です。
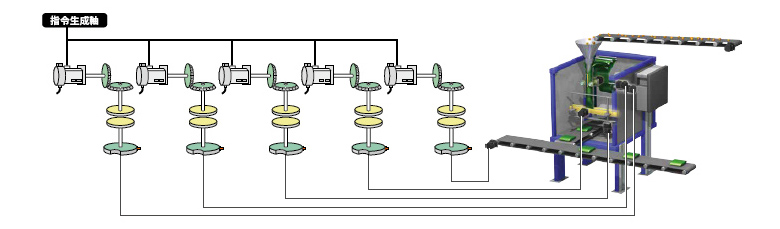
アドバンスト同期制御
ギア、シャフト、クラッチ、変速機、カムなどの機械機構をソフトウェアに置き換えた制御です。
- ●軸ごとに同期制御の始動、停止ができ、同期制御軸と位置決め制御軸の混在が可能です。
- ●入力軸に指令生成軸、サーボ入力軸、同期エンコーダ軸を設定できます。
- ●出力軸はカム動作になります。カム動作には直線動作、往復動作、送り動作があります。
- ●サーボアンプ経由でインクリメンタル同期エンコーダ*1を接続できます。
*1.絶対位置同期エンコーダを接続する場合は、HKシリーズサーボモータのエンコーダを使用してください。
- [指令生成軸とは]
- 指令生成のみを行う軸です。サーボアンプが接続された軸とは独立して制御することができます (制御軸にカウントされません) 。
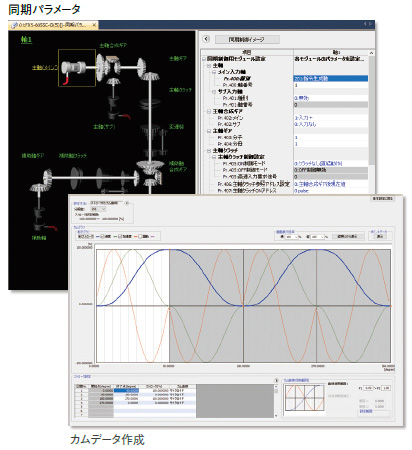
パラメータ設定
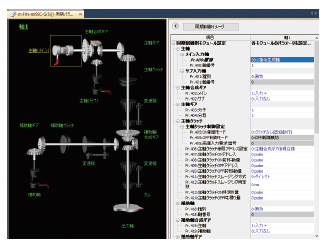
同期制御パラメータに入力軸、出力軸、ギア、クラッチなどのパラメータを設定して、同期制御始動信号をオンするだけで、同期制御を実行します。
カムデータ(演算プロファイルデータ )
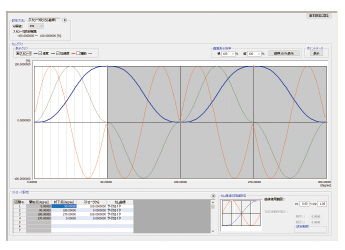
カムデータ曲線をマウスでドラッグ&ドロップして移動すると、マウスの位置に合わせて曲線も変化します。
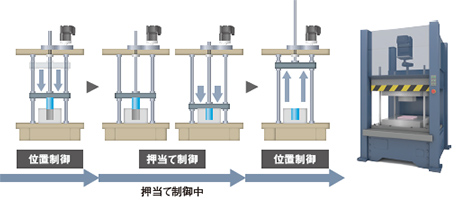
押当て制御
押当て制御は、現在位置管理しながら指令トルクに追従してトルクを一定に制御します。
位置決め制御からサーボモータを停止せずにスムーズに押当て制御へ切り替えることができます。
補助機能
ユニット間同期
同一ベース上の複数のモーションユニット間で制御タイミングをあわせる機能です。
装置ごとにモーションユニットを使用している場合、装置間の同期をとることができます。
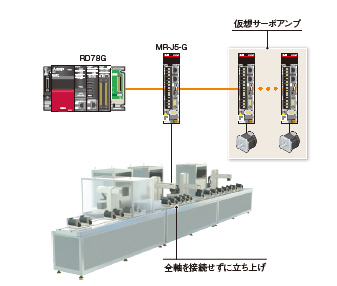
仮想サーボアンプ
サーボアンプを接続していなくても仮想的に (接続しているものとみなして) 動作します。仮想サーボアンプ軸を同期制御のサーボ入力軸として使用することで、仮想的な入力指令で同期制御ができます。
また、サーボアンプ未接続の軸をシミュレーション動作させる用途にも使用できます。
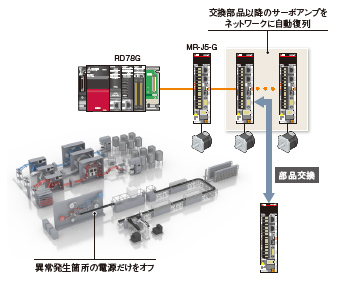
自動復列
データリンク異常により解列されたデバイス局が正常になると、自動的にネットワークに復列してデータリンクを再開する機能です。
システム全体の電源をオフすることなく、異常が発生した装置のみ電源をオフして部品を交換できます。
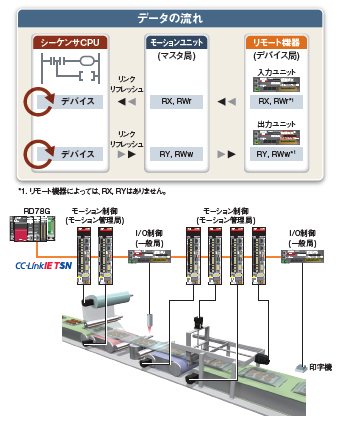
一般局の読み書き
- ●モーション管理局以外のデバイス局を一般局として入出力できます。
- ●マスタ局とデバイス局間で1:1の交信ができます。
- ●シーケンサCPUでデバイス局の信号を使ってプログラミングができます。
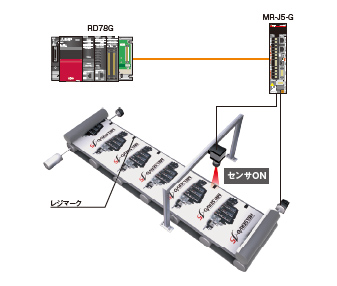
マーク検出
サーボアンプへのトリガ入力を検出するタイミングで、任意のデータをラッチする機能です。
ラッチしたデータから補正量を計算して補助軸にて、補正します。
1 μsの高精度マーク検出が可能です。
CC-Link IE TSN安全通信機能
CC-Link IE TSNは一般制御と安全制御を混在させたシステムを構築することができます。
安全CPUは安全リモートI/O経由で取り込んだ安全信号をチェックし、サーボアンプに安全信号 (STOなど) を出力します。
そのため、安全コントローラやサーボアンプへの安全信号の配線が不要になります。
*1.対応するサーボアンプについては、「安全監視機能」を参照してください。
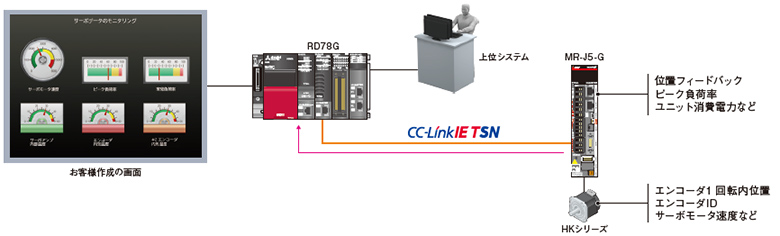
任意データモニタ
運転中にサーボデータを逐次変更・モニタリングが可能です。CC-Link IE TSN経由で取得したサーボアンプ、サーボモータの運転状態を上位システムやお客様作成のGOT画面へ転送・表示できます。
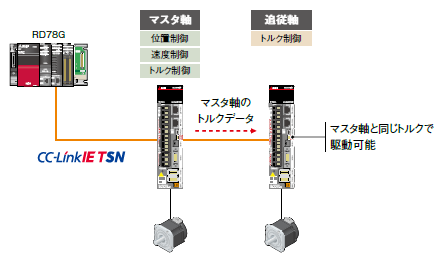
ドライバ間通信
ドライバ間通信機能は、サーボアンプのドライバ間通信機能により、マスタ軸をモーションユニットで制御し、追従軸はモーションユニットを介さずにサーボアンプ間のデータ通信 (ドライバ間通信) により制御する機能です。
モーションユニットはマスタ軸を制御するだけで、複数軸を駆動することができます。
エンジニアリング環境
GX Works3で、シーケンスプログラム作成はもちろん、モーションユニットのパラメータ設定からサーボ調整、デバッグまで様々なシーンに対応でき、エンジニアリング環境による快適な設計環境を構築できます。
MELSOFT GX Works3
様々な機能をGX Works3にまとめることで、プロジェクト作成が簡単になるばかりではなく開発プロセスに統一性を持たせることができます。

システム設計

- ●ユニット構成
- ●ネットワーク構成
- ●サーボアンプのデータ設定
- ●リモートI/Oの設定
- ●パラメータコンバータ機能
プログラミング (位置決め)

- ●ラダー、SFC、FBD/LD言語でプログラミング
- ●位置決めデータ設定
- ●オフラインシミュレーション、指令速度の自動計算
プログラミング (同期制御)
- ●同期制御パラメータ
- ●カムデータ作成、カムデータ一覧
デバッグ/メンテナンス
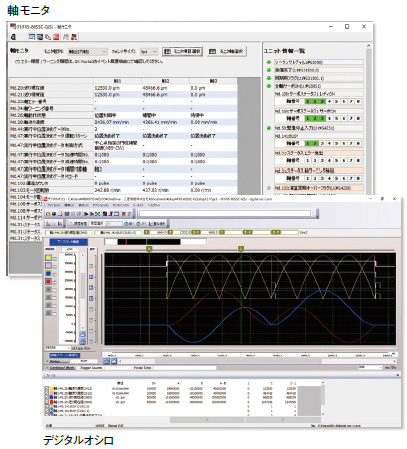
- ●イベント履歴
- ●現在値履歴、始動履歴、軸モニタ
- ●サーボモニタ
- ●デジタルオシロ
仕様一覧
| モーションユニット | ||||
|---|---|---|---|---|
| RD78G16 | RD78G8 | RD78G4 | ||
| 最大制御軸数 | 16 | 8 | 4 | |
| 最小演算周期[μs]※1 | 250 | |||
| サーボアンプ接続方式 | CC-Link IE TSN (通信速度:1 Gbps/100 Mbps) | |||
| 接続サーボアンプ | MR-J5-G,MR-J5W-G,MR-J5D-G4 詳細はこちら | |||
| 最大局間距離[m] | 100 | |||
| 制御方式 | 位置制御,速度制御,トルク制御,同期制御,カム制御 | |||
| 位置決め制御 | 位置制御,直線補間 (最大4軸),円弧補間 (2軸),ヘリカル補間 | |||
| 加減速処理 | 台形加減速,S字加減速 | |||
| 位置決め制御方式 | ポイントテーブル方式 | |||
| 原点復帰機能 | ドライバ式原点復帰※2 | |||
| 手動制御 | JOG運転,手動パルサ運転,インチング運転 | |||
| 補助機能 | 緊急停止,ハードウェアストロークリミット,ソフトウェアストロークリミット, 絶対位置システム,デジタルオシロ,加減速時間変更,ユニット間同期, 目標位置変更,トルク制限値変更,速度変更,オーバライド,CC-Link IE TSN安全通信機能 |
|||
| 共通機能 | ドライバ間通信,マーク検出,仮想サーボアンプ,イベント履歴,任意データモニタ | |||
| エンジニアリング環境 | MELSOFT GX Works3 | |||
| 入出力占有点数 | 32点 | |||
| DC5 V内部消費電流[A] | 1.93 | |||
| 質量[kg] | 0.26 | |||
- ※1:最小演算周期は機種や制御軸数により異なります。
- ※2:ドライバ(サーボアンプ)に設定された原点復帰方式を使用します。