ACサーボ MELSERVO 製品特長

現場の課題はこれで解決!

|
|
|
|
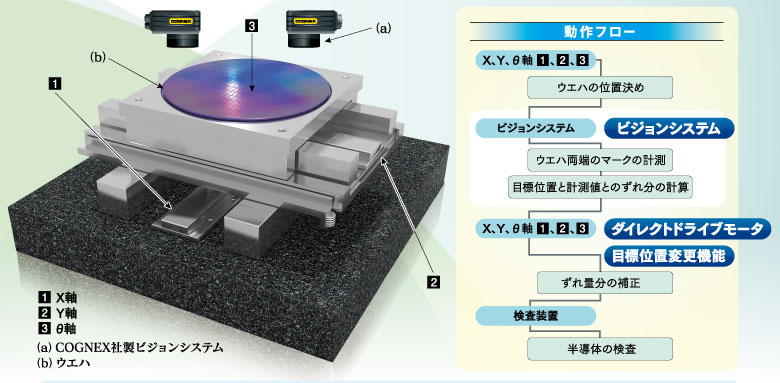

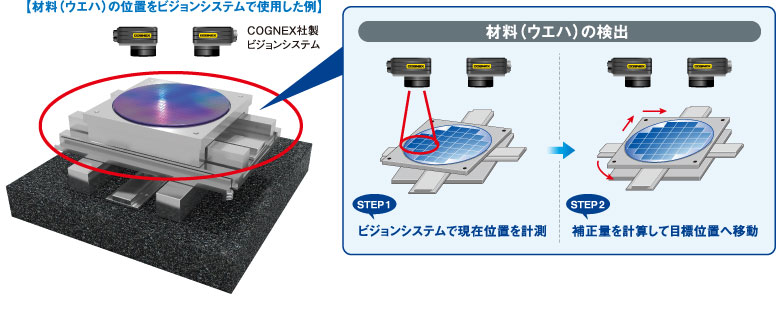
ビジョンシステムで簡単にウエハの現在位置を読み出すことができ、目標位置の補正をして素早く移動することができます。

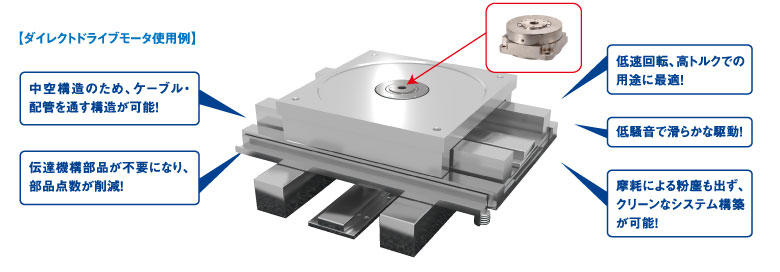
回転軸にダイレクトドライブモータを使用することにより、高応答、高精度で安定した位置決めを実現します。 低速回転、高トルクでの使用にも最適です。

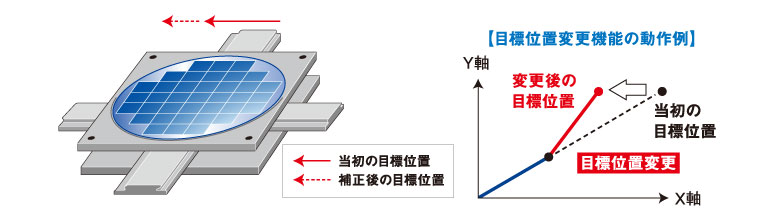
位置決め中にビジョンシステムの位置データから位置補正する際、再度位置決め始動することなく、目標位置に移動させることができ、タクトタイム短縮が図れます。
モデルシステム
機器構成
モーションCPU:Q172DSCPU
シーケンサCPU:Q06UDEHCPU
基本ベース:Q35DB
サーボアンプ:MR-J4-B、MR-J4W2-B
GOT:GOT1000シリーズ
サーボモータ:TM-RFM、LM-H3
入出力ユニット:QX40、QY40P

サーボアンプの設定をします。
モーションコントローラのIPアドレスを設定します。
ビジョンシステムのEthernet通信、ビジョンプログラム動作に関するパラメータを設定します。
簡単なビジョンシステム専用命令を記述するだけで、ビジョンシステムからの位置データを取り込むことができます。