ACサーボ MELSERVO 製品特長

現場の課題はこれで解決!

|
|
|
|


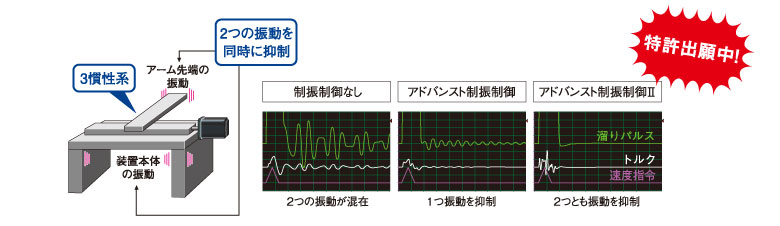
3慣性系の機械に対応した振動抑制アルゴリズムにより、低周波振動を2つ同時に抑制可能。 調整もワンタッチ操作で簡単に実施できます。
アーム先端や装置本体の残留振動の抑制に効果を発揮します。

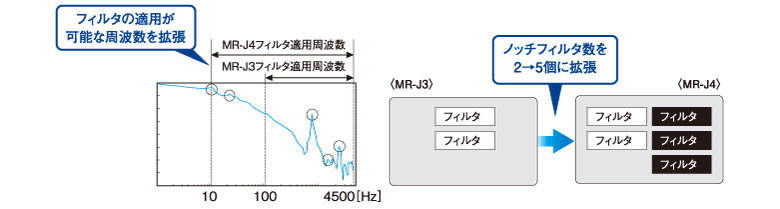
フィルタ構造の高度化により、適用周波数範囲を100Hz~4500Hzから10Hz~4500Hzへと拡張。
さらに同時適用可能なフィルタ数を2個から5個へと拡張することで、機械の振動抑制性能を向上しました。

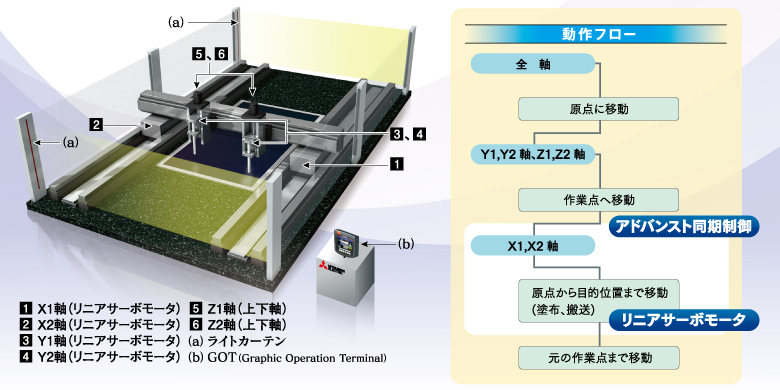
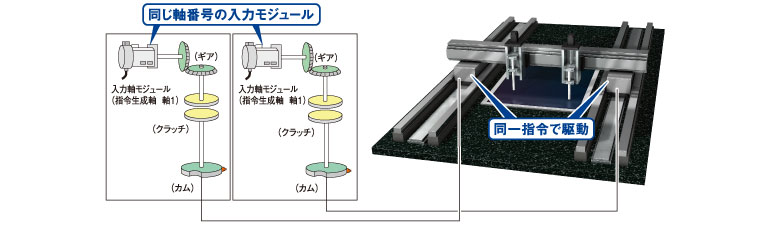
最大速度3m/s(LM-H3 シリーズ)、最大推力150N~7200N、最小分解能0.005μmからの多彩なシリアルI/F エンコーダに対応したサーボアンプを使ったマルチヘッドが可能。
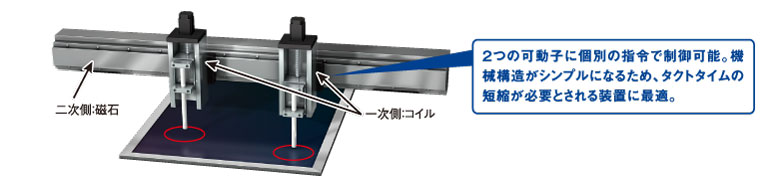

アドバンスト同期制御を使ってカムに同じデータを出力することで、並列駆動(タンデム駆動)を実現できます。
モデルシステム
機器構成
モーションコントローラ:Q172DSCPU
リニアサーボモータ:LM-H3
シーケンサCPU:Q06UDEHCPU
サーボアンプ:MR-J4-B、MR-J4-W2-B
安全信号ユニット:Q173DSXY
GOT:GT1665HS-VTBD
サーボモータ:HG-KR
基本ベース:Q35DB
入出力ユニット:QX40、QY40P

サーボアンプ、サーボモータの設定をします。
リニアサーボモータのパラメータも2画面のデータを設定するだけです。
制振制御モードを3慣性モードにするとアドバンスト制振制御Ⅱを有効にできます。
モーションS F Cプログラム、サーボプログラムを作成します。