ACサーボ MELSERVO 製品特長

現場の課題はこれで解決!

|
|
|
|

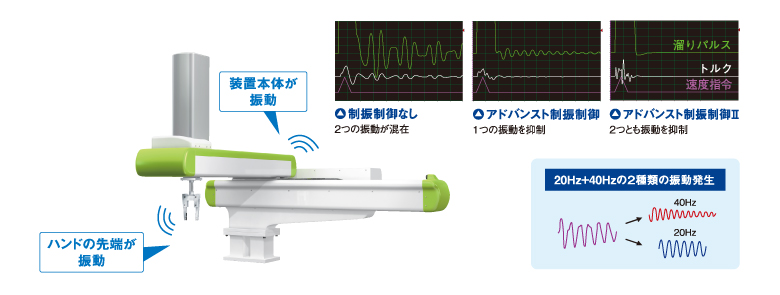
3慣性系の機械に対応した振動抑制アルゴリズムにより、低周波振動を2つ同時に抑制できます。
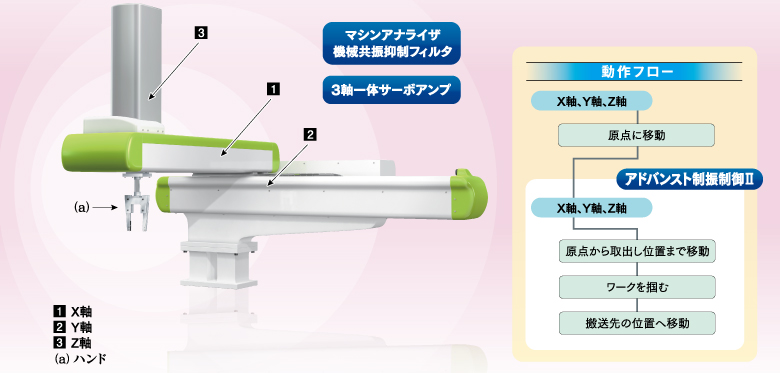
取出しロボットの土台からハンドの先端までに、複数の振動成分がある場合に効果を発揮します。

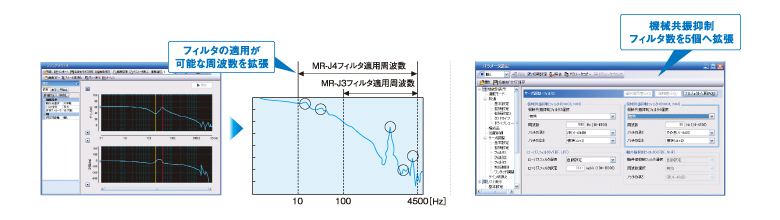
マシンアナライザを使って機械系の周波数特性を解析します。 次に5個の機械共振抑制フィルタを使って振動を抑制できます。

省配線
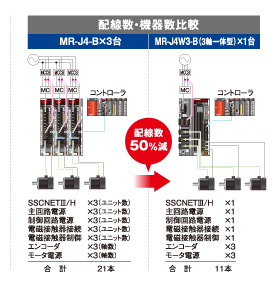
SSCNETⅢ/H対応サーボアンプはパルス列に比べて、大幅な省配線化を実現できます。 3軸一体サーボアンプは主回路/制御回路電源、周辺機器、制御信号線などの接続を3軸で共通化ができ、配線本数および機器数を大幅に削減できます。
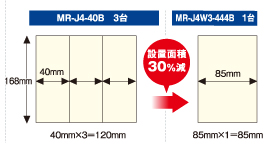
省スペース
3軸一体サーボアンプではMR-J4-Bを3台使用する場合と比較して、設置面積を30%削減できます。
モデルシステム
機器構成
シーケンサCPU:Q06UDEHCPU
基本ベース:Q35DB
GOT:GOT 1000シリーズ
シンプルモーションユニット:QD77MS4
入出力ユニット:QX40、QY40P
サーボアンプ:MR-J4W3-B
サーボモータ:HG-KR

サーボアンプの設定をします。
基本パラメータ1の算出画面を使用すると、電子ギアの設定も機械緒元を入力するだけで必要なパラメータを計算します。
振動抑制モード選択で3慣性モードを選択するとアドバンスト制振制御Ⅱが有効になります。
各軸の位置決めデータを設定します。