ACサーボ MELSERVO 製品特長

現場の課題はこれで解決!

|
|

|
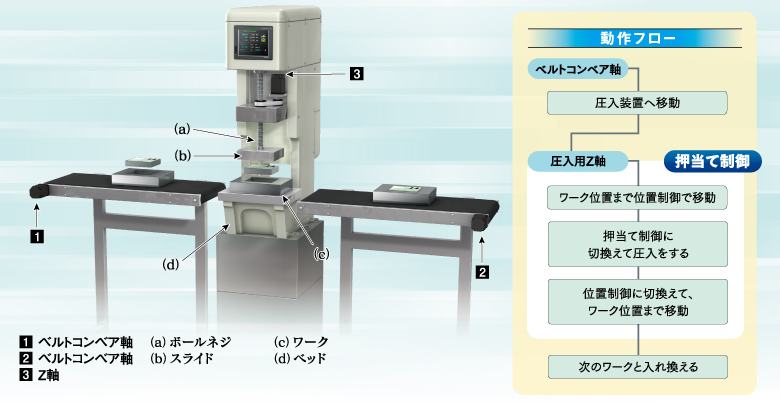
注1:ロードセルに対応したサーボアンプが必要な場合は、支社に問い合わせてください。

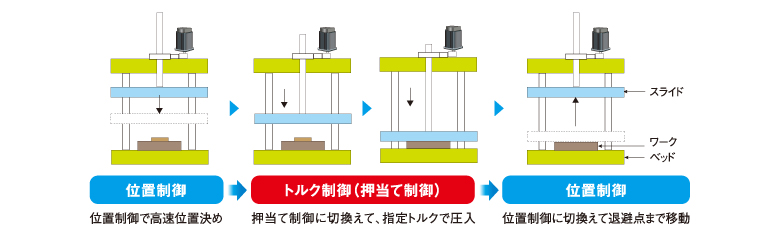
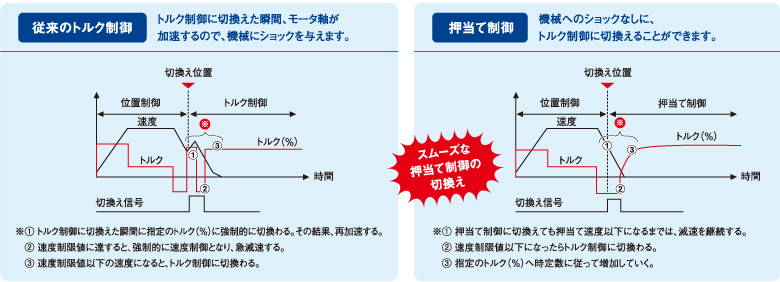
位置制御から停止することなくスムーズに押当て制御に切り換えることができます。
押当て制御中も現在位置管理をしているので、押当て制御から位置制御に切換えた後も高速に位置決めができ、タクトタイムの短縮が図れます。

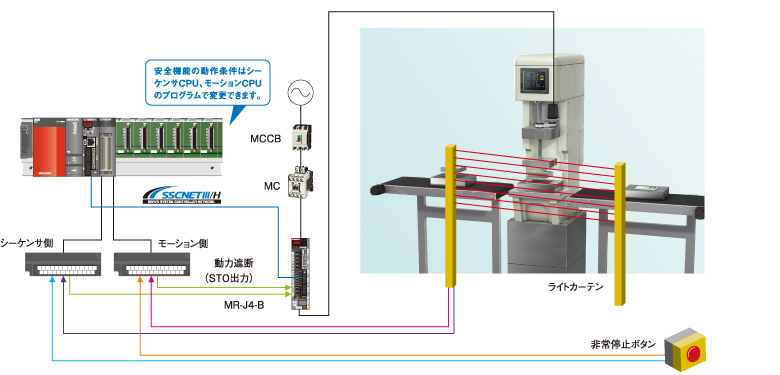
ライトカーテン、非常停止ボタンなど複数点の安全信号を監視する安全システムを構築できます。
モデルシステム
機器構成
モーションCPU:Q172DSCPU
シーケンサCPU:Q06UDEHCPU
安全信号ユニット:Q173DSXY
サーボアンプ:MR-J4-B
GOT:GOT1000シリーズ
基本ベース:Q35DB
サーボモータ:HG-SR
入出力ユニット:QX40、QY40P

システム構成を設定後、サーボデータ画面より速度・トルク制御データを設定します。
モーションSFCプログラム、サーボプログラムを作成します。