MELSERVO-J4シリーズ サーボアンプ 特長-継承と


既設システムとフレキシブルな連携力
MR-J3シリーズからの置換えが容易
取付け互換
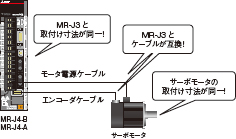
- MR-J4-B/MR-J4-AサーボアンプはMR-J3-B/MR-J3-Aサーボ アンプと取付け寸法が同一です *1 。また回転型サーボモータのHGシリーズは、HFシリーズまたはHC-RP/HC-UPシリーズのサーボモータと取付け寸法が同一 *2 、オプションケーブル互換 (電源ケーブル、エンコーダケーブル *3 、電磁ブレーキケーブル) です。
- *1 200 V 5 kW, 400 V 3.5 kW, 200 V/400 V 11 kW, 200 V/400 V 15 kWは取付け寸法が小さくなっています。
- *2 HA-LPシリーズからHG-JRシリーズへの置換えについては、営業窓口にご確認ください。
- *3 HG-JRシリーズ11 kW~55 kWはエンコーダケーブルが異なります。
SSCNETⅢ/Hコントローラに置換えができない場合
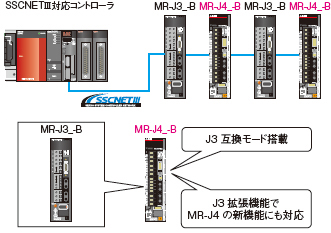
- MR-J4-B/MR-J4W2-B/MR-J4W3-BサーボアンプはJ3互換モードを搭載しています。J3互換モードで動作させることにより、SSCNETⅢ/Hコントローラに置換えができない場合でも、MR-J4シリーズサーボアンプとMR-J3シリーズサーボアンプを混在して使用できます。
- * 混在時の通信速度は50 Mbps、MR-J4の機能・性能はMR-J3相当になります。
- * J3互換モードは一部制約事項があります。詳細については、技術資料集を確認してください。
- MR-J4シリーズの下記の新機能をJ3互換モードのJ3拡張機能で使用可能です。
・ワンタッチチューニング機能
・ロバストフィルタ
・SEMI-F47機能
・ドライブレコーダ機能
・電力モニタ機能・アドバンスト制振制御Ⅱ
・機械共振抑制フィルタ (5個)
・タフドライブ機能
・機械診断機能
・ロストモーション補正機能
パラメータ変換
- MELSOFT MT Works2 *1 でMR-J3-BをMR-J4-Bに変更することで自動的にパラメータが変換されます。
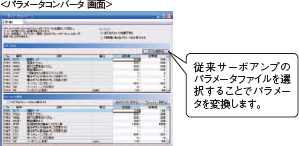
また、MR Configurator2 *1 のパラメータコンバータ機能を使用することで、MR-J3-AのパラメータをMR-J4-Aのパラメータに、 MR-J3-TのパラメータをMR-J4-Aのパラメータに変換できます。 - *1 三菱電機FAサイトから最新版に更新してください。
幅広い電源、容量ラインアップ
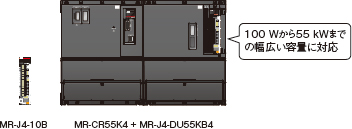
- MR-J4シリーズは、幅広い電源・容量ラインアップで、MR-J3シリーズからの置換えに対応します。
MR-J4-B/MR-J4-Aサーボアンプは、100 W~55 kWまでの幅広い容量を取り揃えており、主回路電源は三相AC200 V、三相AC400 V、単相AC100 Vから選択可能です。 - * ラインアップについては、カタログの「MELSERVO-J4ラインアップ」を参照してください。
MR-J2-Superシリーズからの置換えをサポート
- MR-J4シリーズは、汎用インタフェースや位置決め機能、SSCNETⅢ/Hインタフェースをラインアップ。幅広い指令インタフェースに対応し、MR-J2Sシリーズからの置換えに対応します。
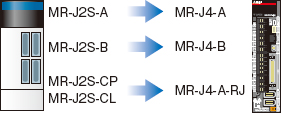
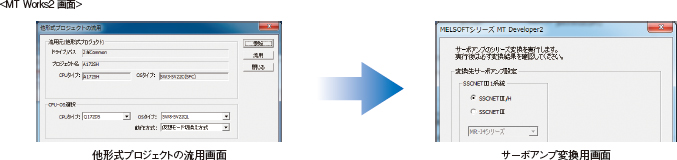
MR-J4シリーズに一括置換えの場合
- MELSOFT MT Works2 *1 でMR-J2S-BをMR-J4-Bに変更することで自動的にパラメータが変換されます。
また、MR Configurator2 *1 のパラメータコンバータ機能を使用することで、MR-J2S-AのパラメータをMR-J4-Aのパラメータに、MR-J2S-CPおよびMR-J2S-CLのパラメータをMR-J4-A-RJのパラメータに変換できます。 - * 三菱電機FAサイトから最新版に更新してください。
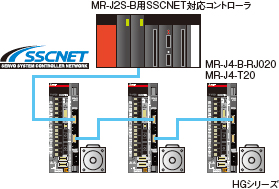
SSCNETⅢ/Hコントローラに置換えができない場合
- MR-J4-B-RJ020サーボアンプとMR-J4-T20 MR-J2S-B用 SSCNET変換ユニットを組み合わせることで、 MR-J2S-B用SSCNET対応サーボシステムコントローラに接続可能です。 *
コントローラをSSCNETⅢ/Hに更新できない場合に、既存の設計資産を活用しコントローラ以外をMR-J4シリーズに更新することができます。 - * 機能・性能はMR-J2S-Bになります。 (J2S互換モード)
- * 詳細については、『MR-J2S-B用SSCNET変換ユニット新製品ニュース』および『 MR-J4-_B_-RJ020 MR-J4-T20 サーボアンプ技術資料集』を確認してください。
次のサーボシステムコントローラに対応します。
A171SHCPU(N), A172SHCPU(N), A173UHCPU, A273UHCPU,
A1SD75M, QD75M, Q172CPU(N), Q173CPU(N)
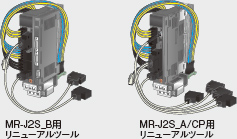
既設配線を活用したい場合
- 既設のHC/HAシリーズサーボモータを使用する場合や、既設配線を活用した置換えに、三菱電機システムサービス株式会社製MR-J2Sリニューアルツールをご用意。
既設配線を活用できるため、配線工事の短縮が可能です。また、既設の取付け穴を利用できるため、短時間での置換えが可能です。
MR-J2Sリニューアルツールの対応機種については、
三菱電機システムサービス株式会社にお問合せください。
URL: www.melsc.co.jp/business/

置換え関連資料
- リニューアルの流れを紹介したカタログから、詳細情報を記載した置換えの手引き、既存配線を活用できるリニューアルツールのご紹介まで、 充実した資料をご用意して置換えをサポート。
MR-J3/J3Wシリーズは2019年5月生産中止しました。MR-J2Sシリーズは2015年8月生産中止しました。
三菱電機FAサイトでサポート
- 三菱電機FAサイトで MELSERVO置換えツール を公開しています。ご使用の回転型サーボモータやサーボアンプなどを選択するとそれに対応したMR-J4シリーズが選定でき、ご使用のMR-J2-SuperシリーズやMR-J3シリーズをMR-J4シリーズに置き換えるための参考として使用できます。
- * 結果については参考とし、最終的にはカタログおよび技術資料集を参照してください。詳細については、営業窓口にお問合せください。

- 三菱電機FAサイトでは、 ACサーボ MELSERVOリニューアル のページに、置換えに必要な情報を掲載しています。また、三菱電機システムサービス株式会社製リニューアルツールの紹介も掲載しています。
- * 結果については参考とし、最終的にはカタログおよび技術資料集を参照してください。詳細については、営業窓口にお問合せください。

置換え相談窓口
- ・MR-J4シリーズへの置換えについての技術的な相談は、下記までお気軽にお問合せください。
- 電話技術相談窓口 受付時間 *1 月曜~木曜 9:00~19:00、金曜 9:00~17:00、 土曜・日曜・祝日 9:00~17:00
| 対象機種 | 共通電話番号 | 機種選択番号 *2 | |
|---|---|---|---|
| サーボ/ 位置決めユニット/ モーションユニット/ シンプルモーションユニット/ モーションコントローラ/ センシングユニット/ 組込み型サーボシステムコントローラ |
MELSERVOシリーズ | 052-712-2444 | 1 |
| 位置決めユニット ( MELSEC iQ-R/Q/Lシリーズ) | 1 | ||
| モーションユニット ( MELSEC iQ-R/iQ-Fシリーズ) | 1 | ||
| モーションソフトウェア | 1 | ||
| シンプルモーションユニット ( MELSEC iQ-R/iQ-F/Q/Lシリーズ) |
1 | ||
| モーションCPU ( MELSEC iQ-R/Qシリーズ) | 1 | ||
| センシングユニット ( MR-MTシリーズ) | 1 | ||
| シンプルモーションボード/ ポジションボード | 1 | ||
| MELSOFT MTシリーズ/MRシリーズ/EMシリーズ | 1 | ||
- *1 春季・夏季・年末年始の休日を除く
- *2 共通電話番号にお電話いただき、「お客様相談内容に関する代理店、商社への提供可否」を回答後に、機種選択番号を入力ください。
機種選択番号は、ガイダンスの途中でも入力いただけます。
従来からの機能も含めた基本機能をしっかりと搭載
多彩な基本機能
位置/ 速度/トルク制御
位置制御、速度制御、トルク制御に対応します。位置制御は位置指令に追従し位置決めを行います。同期制御、補間制御を使用する場合には、位置制御で実施します。速度制御は速度指令に追従し速度を一定に制御します。トルク制御はトルク指令によりトルクを一定に制御します。
制御切換え
位置制御、速度制御、トルク制御を切り換えて使用することができます。
* MR-J4-Aはいずれか2つを切換え可能です。
リアルタイムオートチューニング
加減速時のサーボモータの電流とサーボモータ速度から常に負荷慣性モーメント比を推定するため、応答性を設定するだけで、モデル制御ゲイン、位置制御ゲイン、速度制御ゲインなどを自動設定します。
モデル適応制御
理想モデルに従った高応答で安定した制御を実現します。 2自由度型モデル適応制御のため、指令に対する応答と外乱に対する応答を個別に設定することが可能です。
アダプティブフィルタⅡ
アダプティブフィルタⅡ は、サーボアンプが一定の時間、機械共振を検出してフィルタ特性を自動的に設定し、機械系の振動を抑制する機能です。フィルタ特性 (周波数・深さ)は自動で設定されますので、 機械系の共振周波数を意識する必要がありません。
約100 Hz~2.25 kHzの比較的高い周波数の機械共振に対して有効です。
ローパスフィルタ
サーボ系の応答性を上げていくと発生する、高い周波数の共振を抑えるフィルタです。ローパスフィルタは、初期状態で有効で、設定周波数は自動調整されます。
微振動抑制制御
サーボモータ停止時における±1 pulseの振動を抑制します。
ダイナミックブレーキ
アラーム発生時や停電時、非常停止時などに、サーボモータの端子間を短絡し、速やかにサーボモータを減速させるブレーキ機能です。停止時の保持力はありません。
* 7 kW以下のサーボアンプに内蔵しています。
* 9 kW以上のサーボアンプでは外付けオプションが必要です。
密着取付け
200 V 3.5 kW以下、100 VおよびDC48/24 Vのサーボアンプは、密着取付けが可能です。取付けスペースの効率が格段に向上します。
* 密着取付け時は動作環境条件が異なります。
* 200 V 1 kW/2 kWサーボアンプは、単相電源入力時は不可です。
入力信号選択 (デバイス設定)
デジタル入力の各ピンに対する機能割当てをパラメータの設定で変更できます。
* MR-J4-GF, MR-J4-Aのみの対応です。
出力信号選択 (デバイス設定)
デジタル出力の各ピンに対する機能割当てをパラメータの設定で変更できます。
エンコーダ出力パルス
エンコーダ出力パルスをABZ相パルスとして差動ラインドライバ方式で出力します。サーボモータ1回転あたりの出力パルス数などをパラメータで設定することができます。
* MR-J4W2-BはAB相パルスを出力します。また、MR-J4W3-Bは非対応です。
AB相パルススルー出力
ABZ相差動出力リニアエンコーダを使用する場合、リニアエンコーダからのABZ相信号を、そのままサーボアンプからエンコーダ出力パルスとして出力することができます。リニアエンコーダの信号を分岐することなく、コントローラなどで使用可能です。
* MR-J4-GF-RJ/MR-J4-B-RJ/MR-J4-A-RJのみの対応です。
モニタ (状態表示)
回生負荷率、実効負荷率、瞬時発生トルク、サーボモータ回転速度、溜りパルスなどのサーボの状態をMR Configurator2 を使用して、モニタできます。MR-J4-Aでは、本体7セグメントLEDの表示部でも確認できます。
ゲイン切換え機能
ゲインを切り換えることができる機能です。回転中と停止中のゲインを切り換えたり、運転中に切換え信号を使用してゲインを切り換えることができます。
フィードフォワード
フィードフォワードゲインを設定することで定速運転時に溜りパルスをほぼ0にすることが可能です。軌跡制御時など、位置指令への追従性を高めることができます。
内部速度指令
内部速度指令を最大7個パラメータに保存できます。入力デバイスで使用する内部速度指令を選択することで、アナログ電圧指令を使用せずに、速度制御が可能です。
* MR-J4-Aのみの対応です。
絶対位置検出システム
機械の据付け時に原点セットを実施するだけで、その後の電源投入時に原点復帰を実施する必要はありません。
内蔵回生抵抗
200 W~7 kW のサーボアンプは回生抵抗器を内蔵しているので、オプション設置スペースの削減によるシステム小形化を実現します。
回生オプション
サーボアンプの内蔵回生抵抗器では回生能力が不足する場合に使用できます。5 kW以上のサーボアンプで、回生オプションでも回生能力が不足する場合にはブレーキユニットの使用も可能です。
* オプション品です。
電源回生コンバータ
回生エネルギを電源に戻し、他システム電力として使用可能であるため、省エネに貢献します。
電源回生コンバータユニットMR-CVは、MR-J4-DU_B_(-RJ) ドライブユニットおよびMR-J4-_B_(-RJ) サーボアンプと組み合わせて使用することができます。
多機能回生コンバータFR-XCは、200 V 100 W~22 kW,400 V 0.6 kW~22 kWのサーボアンプで対応します。
アナログモニタ出力
トルク、サーボモータ回転速度、溜りパルスなど、サーボの状態をリアルタイムに電圧で出力します。
* MR-J4W2-B/MR-J4W3-Bは非対応です。
アラーム履歴
過去に発生したアラームを16回分記録します。
MR Configurator2を使用して一覧表示で確認することが可能です。
テスト運転
本稼動に入る前に機械が正常に動くことを確認するための機能です。MR Configurator2を使用して実施できます。
- ● JOG運転
コントローラから指令がない状態で速度制御運転を確認するテスト運転機能です。 - ● 位置決め運転
コントローラから指令がない状態で位置制御による位置決め運転を確認するテスト運転機能です。 - ● モータなし運転
サーボモータを接続しないで、入力デバイスに対して、実際にサーボモータが動いているかのように出力信号を出したり、状態を表示したりできます。コントローラなどのシーケンスチェックに使用できます。 - ● プログラム運転
コントローラを使用しないで複数の簡単な運転パターンを組み合わせた位置決め運転ができます。 - ● 出力信号 (DO) 強制出力
サーボの状態と無関係に出力信号を強制的にオン/オフにすることができます。出力信号の配線チェックなどに使用します。
多軸調整機能
同じ動作をする並列駆動軸を一つの駆動軸とみなし、複数軸のテスト運転・ゲイン調整を同時に実施します。エンジニアリングソフトウェアで対象軸を設定し、簡単に使用できます。
* RnMTCPU, RD77MSとの組合せの対応です。
圧力制御機能
圧力センサ信号を直接サーボアンプに入力し、高応答なフィードバック制御を行うことで、高応答な圧力制御が可能です。
* 圧力制御対応サーボアンプ (MR-J4-B-LL) が必要です。
機種により、一部制約があります。詳細については、各技術資料集を確認してください。