表示器 GOT GOT2000シリーズ

GOT駆動機器(サーボ)連携ソリューション
GOT駆動機器(サーボ)連携ソリューション

GOT2000にMR Configurator2(MR-J5/MR-J4)の機能を一部搭載!
現場作業のパソコンレス化を実現し、立上げ作業、調整作業の効率化、予防保全、保守作業の効率化、コスト削減に貢献します。
GOT2000が、現場作業の抱える様々な課題を解決します。
GOTとサーボシステムとの連携を実現するシステム構成
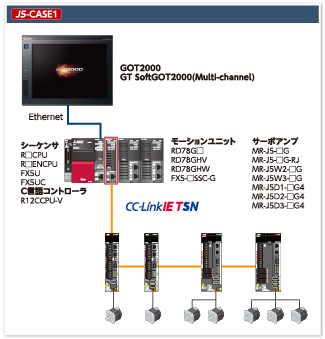
■システム構成の特長
- 指令インタフェース:
CC-Link IE TSN - 制御方式(PLCopen Ⓡ モーション制御FBモード):
位置決め制御、ダイレクト制御 - 制御方式(シンプルモーションモード):
位置決め制御、軌跡制御、速度制御、速度・トルク制御、同期制御、押当て制御 - プログラム:
シーケンサCPU:ラダー、FBD/LD、ST言語
C言語コントローラ:C/C++、Visual Basic、C#
モーションユニット:ST言語 - 最大制御軸数:
RD78G:4軸、8軸、16軸、32軸、64軸
RD78GH:128軸、256軸
FX5-□SSC-G:4軸、8軸
* 使用する機器によって制御方式・仕様が異なります。
詳細は、サーボアンプのマニュアルをご参照ください。
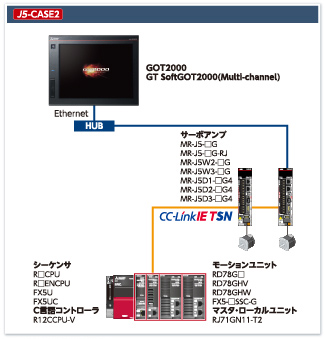
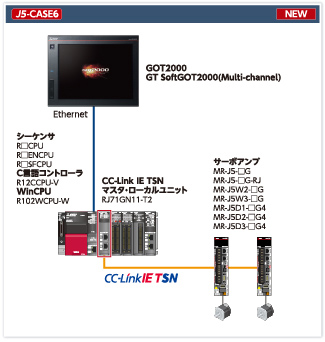
■システム構成の特長
- 指令インタフェース:
CC-Link IE TSN - 制御方式(PLCopen Ⓡ モーション制御FBモード):
位置決め制御、ダイレクト制御 - 制御方式(シンプルモーションモード):
位置決め制御、軌跡制御、速度制御、速度・トルク制御、同期制御、押当て制御 - プログラム:
シーケンサCPU:ラダー、FBD/LD、ST言語
C言語コントローラ:C/C++、Visual Basic、C#
モーションユニット:ST言語 - 最大制御軸数:
RD78G:4軸、8軸、16軸、32軸、64軸
RD78GH:128軸、256軸
FX5-□SSC-G:4軸、8軸
RJ71GN11-T2:120軸
* 使用する機器によって制御方式・仕様が異なります。
詳細は、サーボアンプのマニュアルをご参照ください。
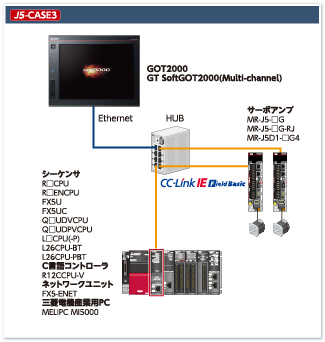
■システム構成の特長
- 指令インタフェース:
CC-Link IEフィールドネットワーク Basic - 制御方式:
プロファイル位置モード、ポイントテーブルモード - プログラム:
シーケンサCPU:ラダー、FBD/LD、ST言語
C言語コントローラ:C/C++、Visual Basic、C# - 最大制御軸数:
16軸、32軸、64軸
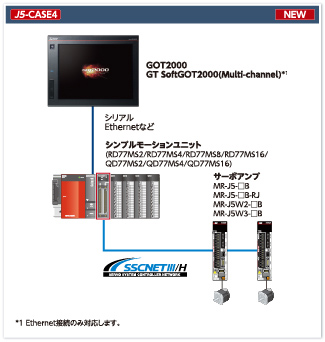
■システム構成の特長
- 指令インタフェース:
SSCNETIII/H - 制御方式:
位置決め制御、軌跡制御、速度制御、速度・トルク制御、同期制御、押当て制御 - プログラム:
シーケンサCPU:ラダー、FBD/LD、ST言語 - 最大制御軸数:
2軸、4軸、8軸、16軸
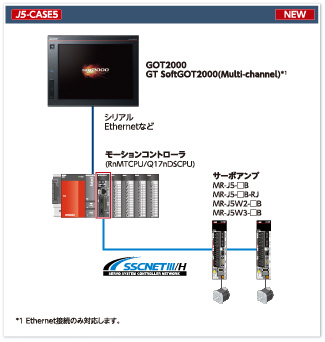
■システム構成の特長
- 指令インタフェース:
SSCNETIII/H - 制御方式:
位置決め制御、軌跡制御、速度制御、速度・トルク制御、同期制御、押当て制御 - プログラム:
シーケンサCPU:ラダー、FBD/LD、ST言語
モーションコントローラ:モーションSFC - 最大制御軸数:
16軸、32軸、64軸
■システム構成の特長
- 制御方式:
プロファイル位置モード、ポイントテーブルモード - プログラム:
シーケンサCPU:ラダー、FBD/LD、ST言語
C言語コントローラ、WinCPU:C/C++、Visual Basic、C# - 最大制御軸数:
120軸
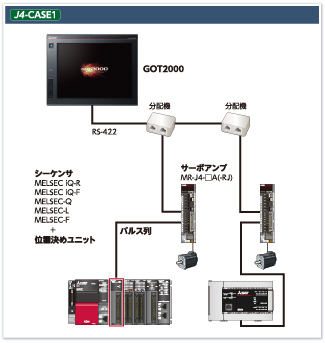
■システム構成の特長
- 指令インタフェース:
パルス列 - 制御方式:
位置決め制御 - プログラム:
シーケンサCPU:ラダー、FBD/LD、ST言語 - 最大制御軸数:
1軸、2軸、4軸、8軸、32軸
* MR-J3互換モードでは、使用できません。

■システム構成の特長
- 指令インタフェース:
SSCNETIII/H - 制御方式:
位置決め制御、同期制御、速度制御、トルク制御、押当て制御、カム制御 - プログラム:
シーケンサCPU:ラダー、FBD/LD、ST言語 - 最大制御軸数:
2軸、4軸、8軸、16軸
* MR-J3互換モードでは、使用できません。

■システム構成の特長
- 指令インタフェース:
SSCNETIII/H - 制御方式:
位置決め制御、同期制御、速度制御、トルク制御、押当て制御、カム制御 - プログラム:
シーケンサCPU:ラダー、FBD/LD、ST言語
モーションコントローラ:モーションSFC - 最大制御軸数:
16軸、32軸、64軸
* MR-J3互換モードでは、使用できません。

■システム構成の特長
- 指令インタフェース:
CC-Link IEフィールドネットワーク - 制御方式:
位置決め制御、同期制御、速度制御、トルク制御、カム制御 - プログラム:
シーケンサCPU:ラダー、FBD/LD、ST言語 - 最大制御軸数:
4軸、8軸、16軸、32軸
システム構成の対応GOT機種、駆動機器(サーボ)連携機能一覧
駆動機器(サーボ)連携機能は、システム構成によって対応する機能が異なります。
詳細は、 をご参照ください。
| 関連資料 | ||
|---|---|---|
|
|
GOT2000 駆動機器(サーボ)連携ソリューション <掲載内容> 革新的な駆動機器連携 さらなる使いやすさ・付加価値を求めて。 駆動機器(サーボ)連携ソリューションの詳細はこちら |
作成: 容量: (PDF) |