産業用・協働ロボット MELFA ソリューション
オープンプラットフォーム対応

オープンプラットフォーム対応
三菱電機 産業用・協働ロボットMELFAは、オープンプラットフォームでご使用いただくことが可能です。
MELFA ROS 2 Driver
ROSとは?
ROS(Robot Operating System)とは、Linux上で動作するオープンソースのフレームワークです。
一般的にOSの要求スペックが低く、導入するための費用が抑えられる特長があります。
最近ではより実運用向けのROS 2が登場しています。
ROS 2 Driverについて
ROS 2上で動作する三菱電機産業用・協働ロボット向けのドライバをGitHub上で公開しています。
※対象機種、インストール方法はGitHubの記載を参照してください。

MELFA API for Linuxについて
MELFA API for Linuxとは?
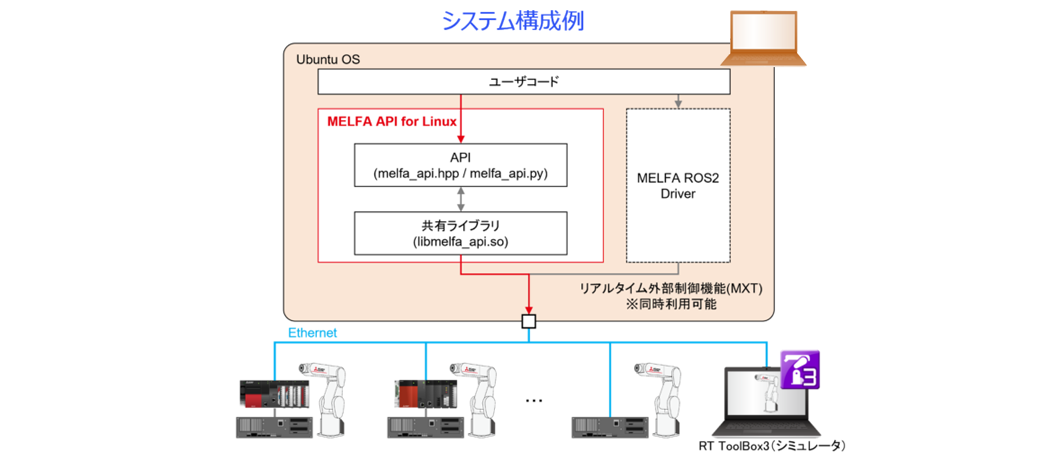
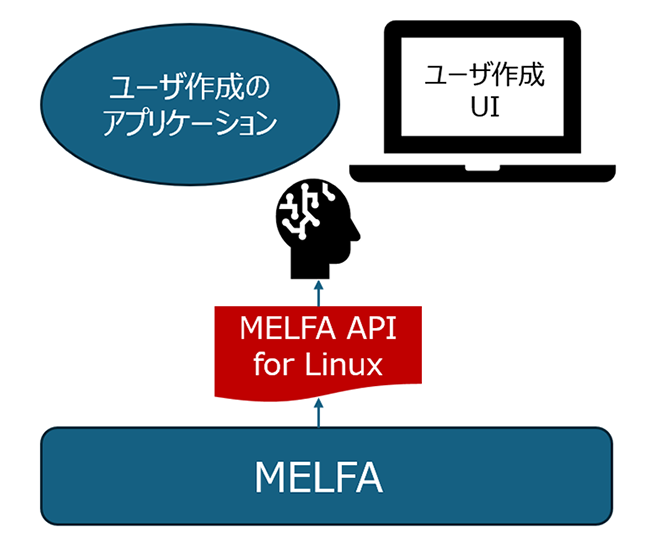
MELFA API for Linuxとは、Linux上で三菱電機産業用ロボットMELFAを操作するためのプログラミングインタフェース(通信ミドルウェア)で、本製品を介することでLinux上からMELFAを動作させることが可能です。
ROSの柔軟性とMELFAが持つ高い性能を組み合わせたアプリケーションの作成が可能となります。
| MELFA API for Linuxがない | MELFA API for Linuxがある |
|---|---|
|
|
| 時間をかけてもできることは少ない | 時間をかけずにMELFAの基本的機能が全て使える |
システム構成例
リアルタイム外部制御機能(MXT)
リアルタイム外部制御機能(MXT)とは?
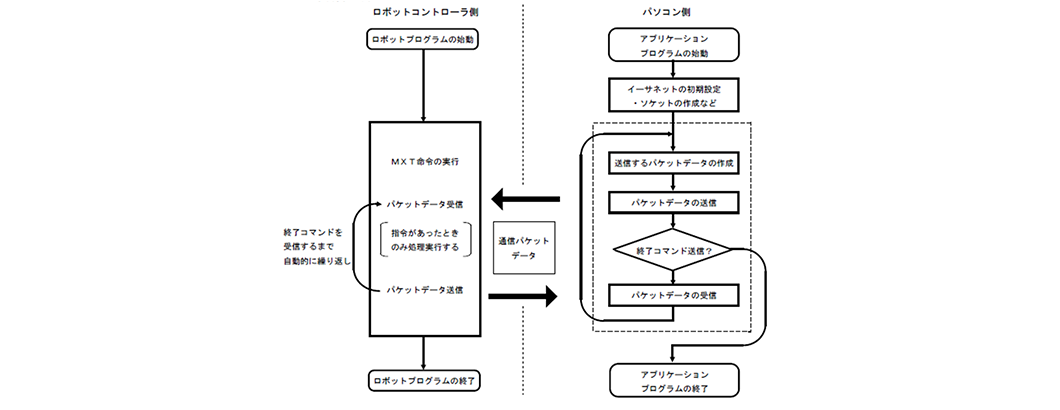
リアルタイム外部制御機能(MXT)とは、イーサネットのネットワークで接続されたPCなどからロボットの座標情報をリアルタイムに取り込んでロボットをその座標へ正確に移動させることを可能にします。
生産システムなどの外部システムとの連携やロボットコントローラやシーケンサでは演算が難しい経路生成方法を採用することで複雑な動作を可能とします。
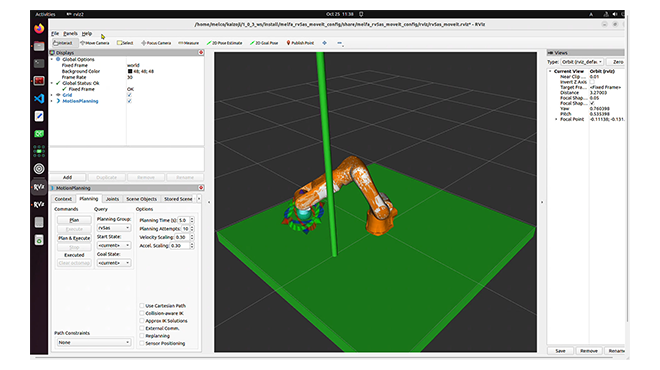
活用例:ロボットのモーションプランニング
リアルタイム外部制御機能の流れ
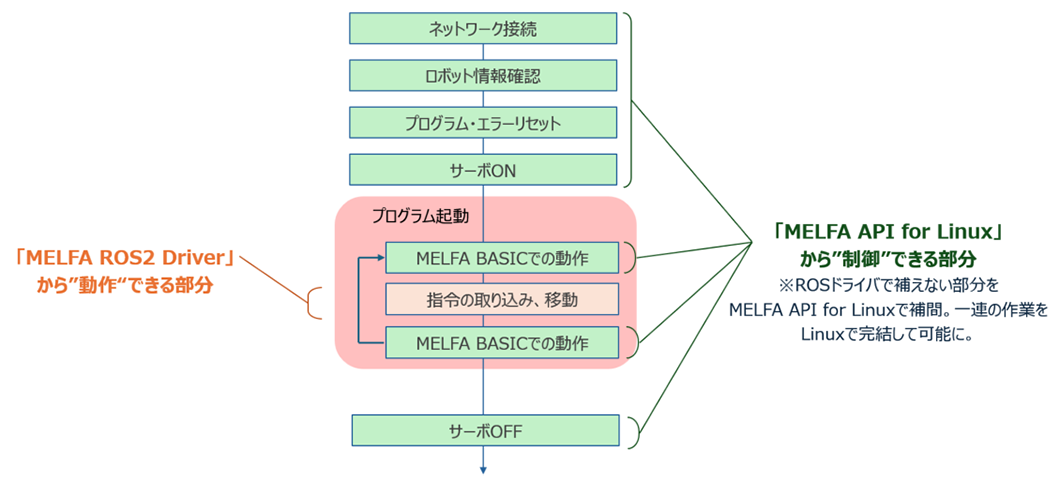
活用例:Linux上でMELFAを制御する
MELFA ROS 2 Driverと組み合わせることで、LinuxからMELFAの操作を完結できます。
活用例:貴社専用アプリを低コストで作成
- ロボットの各種情報を時系列で取得し、動作の解析や異常検出に活用
→ 専用の監視アプリの作成が可能 - 現在位置、電流値、モータ負荷率、エラー情報など、詳細なデータを取得
→ Linux環境下でも、トラブルシューティングの選択肢を増加 - 取得したデータをインターネット上に公開済のAIツールで解析
→ OSSと連携しやすいLinuxベースだからこそ可能 - ユーザー独自のインタフェースを開発し、ロボットの状態監視ダッシュボードを構築
→ 専用カスタムされたシステムを低コストで実現可能 - QtなどのGUIフレームワークと連携することで
→ 直感的でカスタマイズ性の高い操作画面
サンプルライブラリのダウンロード
本FAサイトよりリアルタイム制御機能とMELFA API for Linuxのサンプルライブラリをダウンロードしてご使用いただけます。