産業用・協働ロボット MELFA ソフトウェア MELSOFT RT ToolBox3

プログラム編集・デバッグ機能
- MELFA-BASIC IV、V、VI、MOVEMASTERコマンドでのプログラム作成が可能です。(使用できる言語は、機種により異なります。)
- マルチウィンドウ方式による作業の効率化、各種編集機能の充実を図りました。
- プログラムのステップ実行、ブレークポイントの設定など、動作確認に便利です。

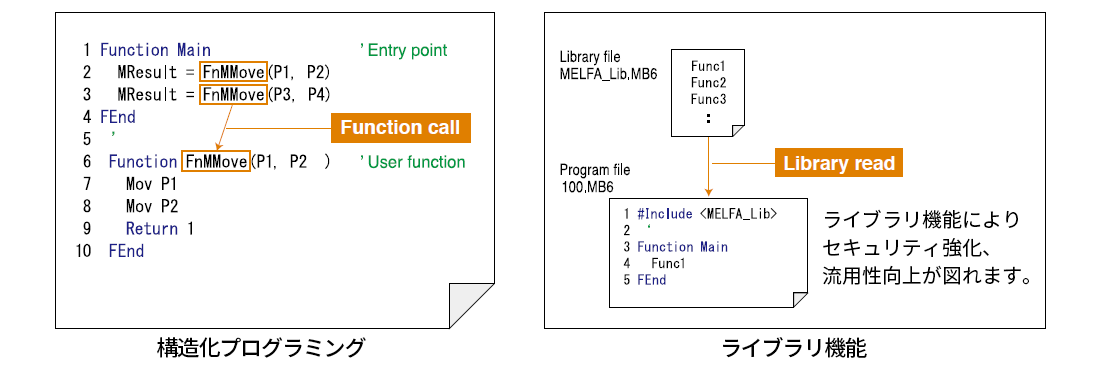
MELFA-BASIC VI
充実した命令に加え,構造化プログラミングにより、再利用性・可読性の高いプログラミングが可能です。
- 構造化プログラムが可能になり、再利用性・可読性の高いプログラミングを記述することが可能です。
- プログラム処理をライブラリとすることにより、ノウハウの蓄積と再利用性向上を実現します。
ライブラリは隠蔽化することが可能なため、ノウハウ の流出を防止します。
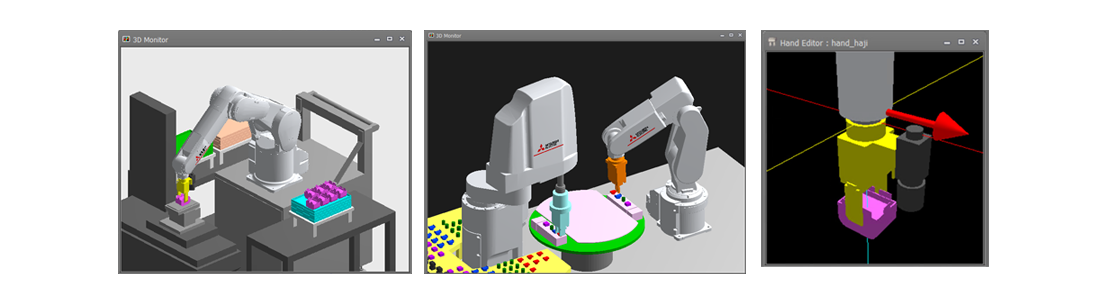
3Dビューア
- 3Dビューアによるロボットの姿勢や動作の確認、ユーザ定義領域などのリミット値の確認が可能です。
- 基本物体による周辺装置の仮想配置などが可能です。
- ロボットと周辺装置との干渉チェックにも使用できます。画面上での距離測定等の機能も充実しています。
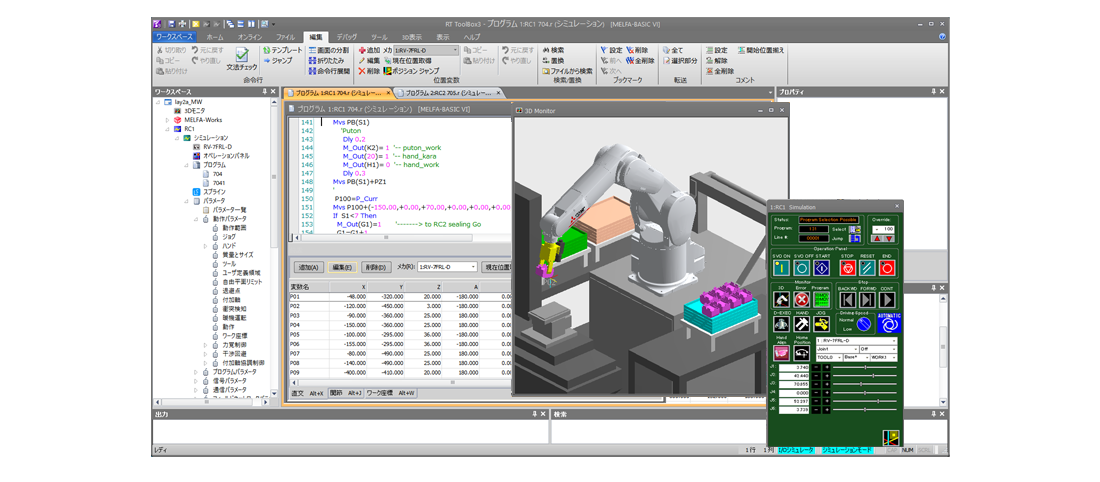
シミュレーション機能
ロボットプログラムをパソコン上で実行し、入出力信号を含めシミュレーションします。このため、実際のシステムと同じ動きをそのまま再現することが可能です。
ロボット動作のサイクルタイムを測定することもでき、システム事前検討に有効です。
- 最大8台のロボットが起動でき、ロボット同士の協調動作の確認もできます。
- サーボのシュミレーションも可能ですので負荷の事前検討ができます。
- GX works2、GX works3との信号連係が可能で、簡単なラインシュミレータが作成できます。
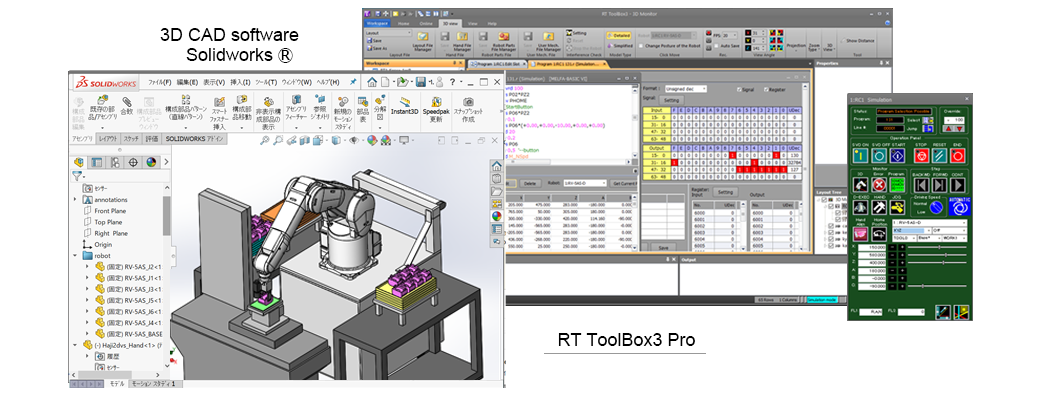
MELFA-Works機能
RT ToolBox3 Proでは、MELFA Works機能を使用することができます。
SolidWorks®上でのロボット生産システムのシミュレーションや、ワーク上の加工経路のデータ出力が可能です。
MELFA Works機能はSolidWorks®のアドイン機能です。3次元CAD「SolidWorks®」ソフトウェアにアドインして使用できます。
(※SolidWorks® はSolidWorks社 (米国)の登録商標です。)
主な機能
- ロボットの動作シミュレーション
3次元CAD「SolidWorks®」上でロボットプログラムを入出力信号を含めシミュレーションします。 - サイクルタイム
ロボット動作のサイクルタイムを測定することができます。 - 干渉チェック
ロボットと周辺装置との干渉チェックが可能です。 - CADリンク機能
シーリング作業など多くのティーチングが必要となる作業を、三次元CADデータ上から加工部を選択するだけで必要な作業データを作成する機能です。三次元CADデータ上から作成するため、複雑で立体的な曲線に対応できます。 - キャリブレーション
CADリンク機能で作成したCAD座標における点列データをロボット座標のデータに補正します。
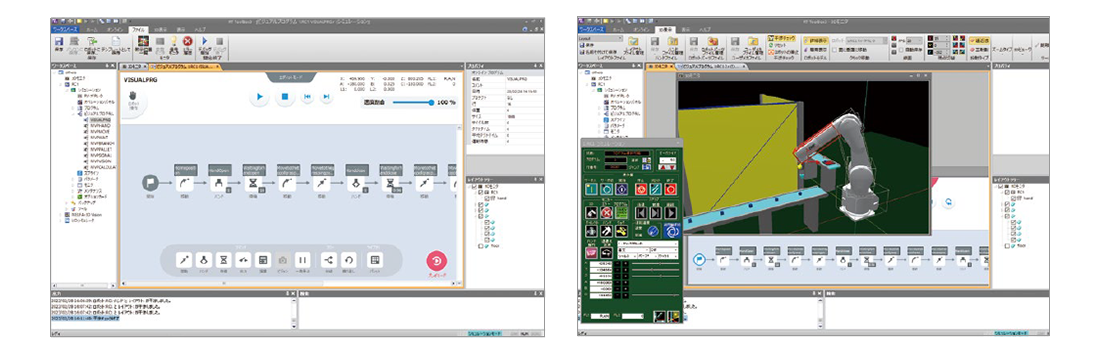
ビジュアルプログラム機能
RT VisualBoxのビジュアルプログラム機能をRT ToolBox3に搭載。直感的な操作で視覚的にプログラム作成が可能です。ロボットの知識が無くても、簡単にロ ボットの立ち上げを行うことができます。
シミュレーションにも対応しており、ビジュアルプログラムで作成した動作を3Dレイアウト上で動作確認・干渉チェックを行うことも可能です。