シミュレーションソフトウェア MELSOFT Gemini

人/AGVの使い方
ラインシミュレーションにおける人やAGVの設定方法について学ぶことができます。
対象製品:MELSOFT Gemini EssentialsまたはProfessionalまたはPremium
-

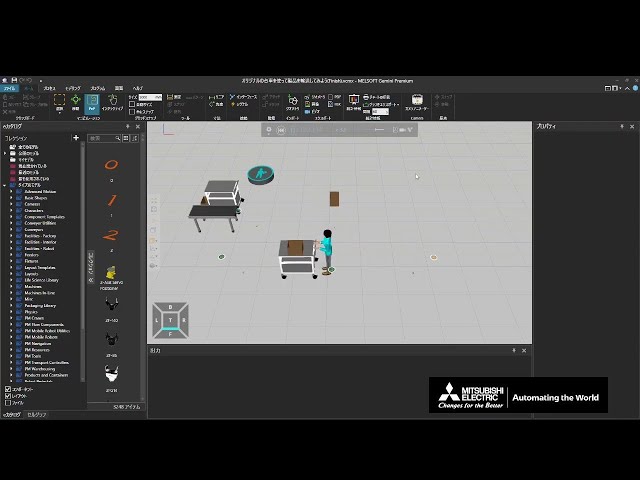
作業者に製品を輸送させよう
指定した場所の間で、作業者に製品を輸送させる方法
付属ファイル -

AGVの輸送を制御してみよう
ChargeOnIdleはGemini1.48以降の機能です。 AGV同士の衝突を回避する方法やAGVの状態を制御する方法 (関連動画:AGVに障害物を検出させたり、移動範囲を制限したりしてみよう、リソースとコントローラーの設定項目について知ろう(3/4)、アイドリングと充電の設定をしてみよう、自動ドアを作ってみよう(1/2))
付属ファイル -

AGVに障害物を検出させたり、移動範囲を制限したりしてみよう
AGVに障害物を検出させる方法と、AGVの移動範囲を制限する方法
付属ファイル -
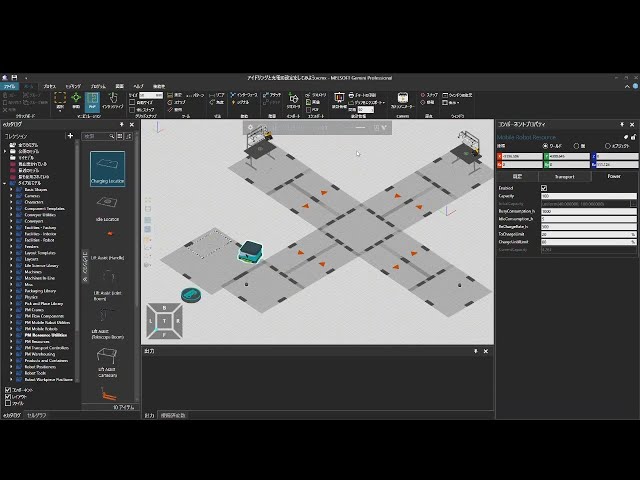
アイドリングと充電の設定をしてみよう
AGVの一時待機と自動充電の設定方法
付属ファイル -

AGVが製品をピック&プレースする時の位置を変更しよう
AGVが製品を積む、降ろす時の一時停止位置を変更する方法
付属ファイル -

製品の輸送元と輸送先の設定を知ろう
製品を輸送する設定で使用する、リソース(人やロボット)の考え方やプロパティの説明
付属ファイル -

リソースとコントローラーの設定項目について知ろう(1/4)
プロセスモデリングの、人やAGV等のリソースと、制御するコントローラの設定方法(輸送や作業の優先度、リソースへのタスクの割り当て優先度、製品の収集方法、使用する道具の指定)
付属ファイル -

リソースとコントローラーの設定項目について知ろう(2/4)
プロセスモデリングの、人やAGV等のリソースと、制御するコントローラの設定方法(AGVの待機・充電場所、製品を持ったままの一時待機、製品の積み降ろしを補助する人やロボットの指定、積み降ろしの作業位置指定、装置がリソースを予約して占有)
付属ファイル -

リソースとコントローラーの設定項目について知ろう(3/4)
プロセスモデリングの、人やAGV等のリソースと、制御するコントローラの設定方法(障害物の検出・回避、移動範囲の指定、範囲内のリソースの数を制限)
付属ファイル -
リソースとコントローラーの設定項目について知ろう(4/4)
人が台車(Pallet Jack)を使って製品を輸送する方法
付属ファイル -

作業者の立ち位置を変更しよう(1/2)
作業場所に人、AGV、フォークリフトの新しい立ち位置を追加する方法 (関連動画:AGVが製品をピック&プレースする時の位置を変更しよう)
付属ファイル -

作業者の立ち位置を変更しよう(2/2)
フレームを作業者の立ち位置に設定する方法 (リソースポジションフレーム、ResourcePickOffset、ResourcePlaceOffset、PickApproach、PlaceApproach)
付属ファイル -
ツールを使って製品を輸送してみよう
人が台車(Pallet Jack)を使って製品を輸送する方法
付属ファイル -

製品の積み降ろしを他の作業者などにさせよう
製品の積み降ろしを他の作業者などにさせる方法
付属ファイル
例:AGVへの製品の積み降ろしを、作業者が行う -

ひとつのリソースが続けて作業を行うようにしてみよう
複数の作業やリソースがある場合、指定した作業をひとつのリソースが続けて行う方法(Human Transport ControllerのReserveResource、ReleaseResource)
付属ファイル -

輸送と作業の優先度について学ぼう
輸送タスクや作業タスクに対して優先度を設定する方法(Priority)
付属ファイル -

リソースが実行するタスクの順番をミッションで制御してみよう
Gemini 1.48以降の機能です。 ラインシミュレーションの実行タスクの順番をMission Controllerで制御する方法
付属ファイル -

作業者の移動量・移動時間を確認しよう
作業者の移動量・移動時間を統計ダッシュボードに表示して確認する方法。
付属ファイル -
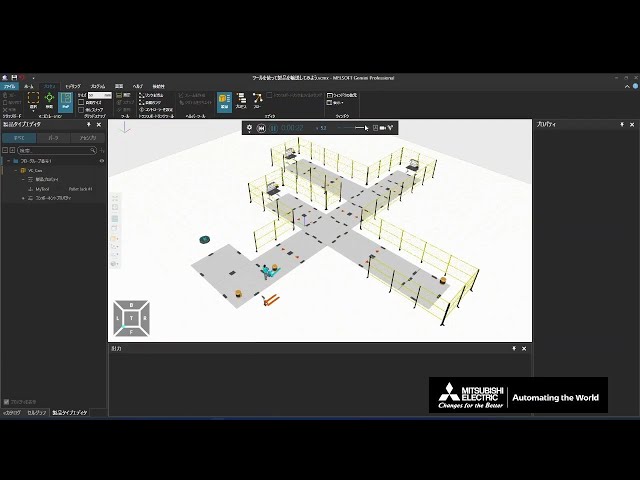
オリジナルの台車を使って製品を輸送してみよう
オリジナルの台車を使って、製品を搬出する方法。 (アタッチステートメント、デタッチステートメント、製品ポジションフレーム、TransportLocation)
付属ファイル -
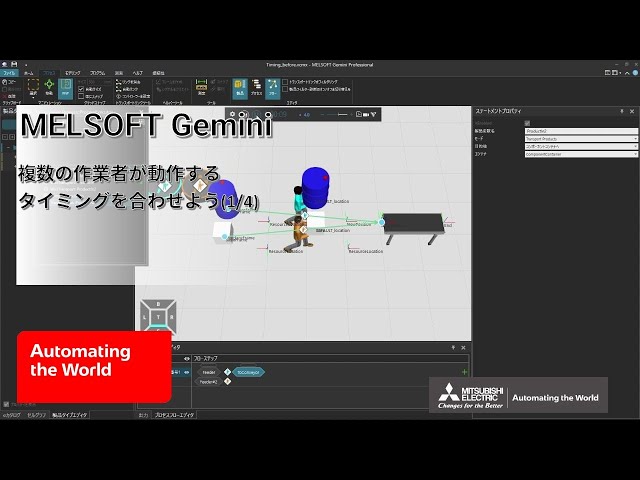
複数の作業者が動作するタイミングを合わせよう(1/4)
複数の作業者が一緒に1つの製品を搬送しているような見た目を表現するため、メインの製品と一緒にダミーの製品を搬送させる方法
付属ファイル -
複数の作業者が動作するタイミングを合わせよう(2/4)
複数の作業者が一緒に1つの製品を搬送しているような見た目を表現するため、製品を搬入完了するタイミングを合わせる方法
付属ファイル -

複数の作業者が動作するタイミングを合わせよう(3/4)
複数の作業者が一緒に1つの製品を搬送しているような見た目を表現するため、製品を搬出開始するタイミングを合わせる方法
付属ファイル -

複数の作業者が動作するタイミングを合わせよう(4/4)
複数の作業者が一緒に1つの製品を搬送しているような見た目を表現するため、他の作業を割り込ませない方法
付属ファイル