-
2.1.1
-
サーボ入力軸パラメータ
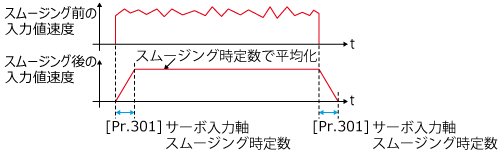
■[Pr.301:サーボ入力軸スムージング時定数]
サーボ入力軸からの入力移動量をスムージング処理するときの平均化時間を設定します。
スムージング処理により、「実現在値」や「フィードバック値」を入力値に設定したときの速度変動を抑えることが
できます。ただし、スムージング処理により設定時間分だけ入力応答が遅れます。
■[Pr.302:サーボ入力軸位相補正進め時間]、[Pr.303:サーボ入力軸位相補正時定数]
サーボ入力軸の位相(入力応答)を進めたり遅らせたりするときに設定します。
本コースでは説明を省略します。詳細は下記マニュアルを参照してください。
 MELSEC iQ-R モーションユニットユーザーズマニュアル(シンプルモーションモードアドバンスト同期制御編)
MELSEC iQ-R モーションユニットユーザーズマニュアル(シンプルモーションモードアドバンスト同期制御編)- 4 アドバンスト同期制御
- 4.8 位相補正機能
- MELSEC iQ-F FX5モーションユニット/シンプルモーションユニットユーザーズマニュアル(アドバンスト同期制御編)
- 4 アドバンスト同期制御
- 4.8 位相補正機能
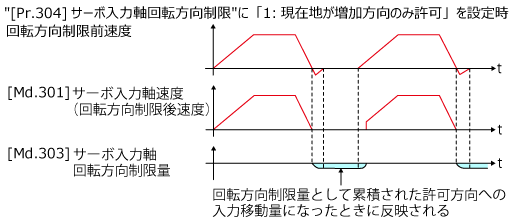
■[Pr.304:サーボ入力軸回転方向制限]
サーボ入力軸からの入力移動量を一方向に制限するときに設定します。
「実現在値」や「フィードバック値」を入力値に設定したときの機械振動などによる逆転動作を防止できます。
| 設定値 | 内容 |
| 0:回転方向制限なし | 回転方向制限は行いません。 |
| 1:現在値が増加方向のみ許可 | サーボ入力軸現在値が増加する方向の入力移動量のみ許可します。 |
| 2:現在値が減少方向のみ許可 | サーボ入力軸現在値が減少する方向の入力移動量のみ許可します。 |
許可方向と逆方向の入力移動量は回転方向制限量として累積され、許可方向への入力移動量になったときに
反映されます。このため、逆転動作を繰り返してもサーボ入力軸現在値がずれることはありません。
回転方向制限量は、サーボ入力軸に以下の操作を行ったとき0クリアされます。
サーボアンプ接続時/原点復帰実行時/現在値変更時