






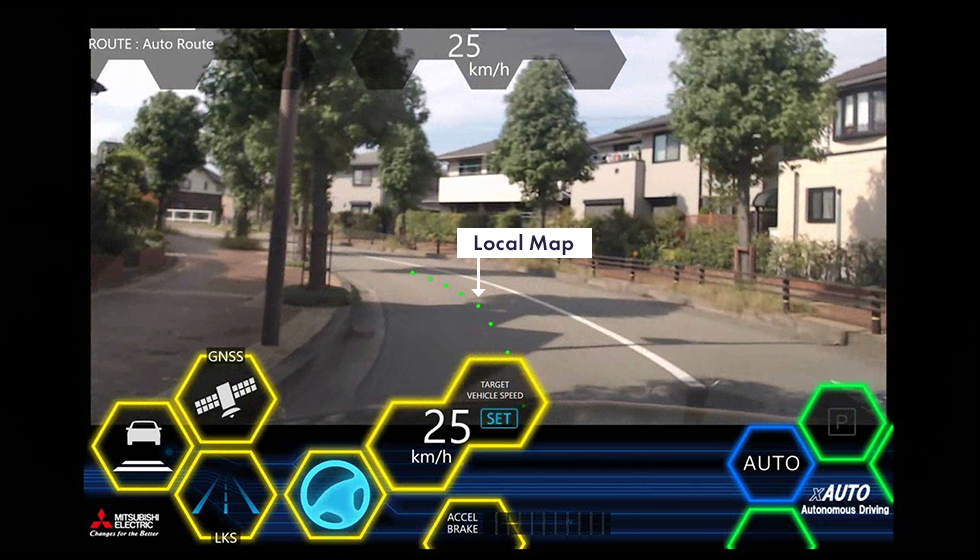
1. Leverages “local maps” to achieve autonomous driving even without high-accuracy map information.
Statistically calculates one travel route from multiple centimeter level accurate travel routes and records this as a “local map.” Through autonomous driving control following this map, enables autonomous driving even on roads in residential areas, private roads, farm roads, etc. where high-accuracy map information is unavailable.
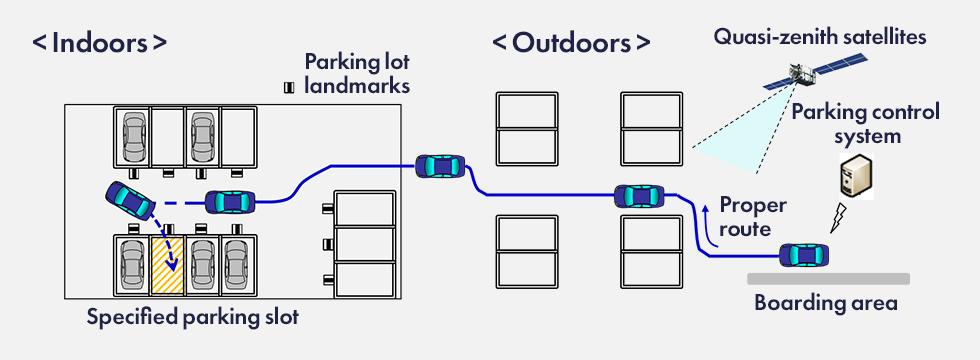
2. Realizes unmanned self-parking inside and outside through accurate self-position estimation and optimal travel route.
With a control system using parking lot infrastructure for determining travel route and vehicle system controlling vehicles based on vehicle positional information, realizes accurate “valet” parking automatically both indoors and outdoors.
3. Recognizes surrounding conditions immediately and with high accuracy using original sensor fusion technology.
To address delays, etc. due to increased sensor usage, developed a sensor fusion technology for offsetting processing delay for various data outputted from sensors then combined with optimal data. Even if the amount of vehicle sensors increase, the surrounding conditions can be recognized at high-accuracy early on.
