MELSERVO-J4 Solutions vol.10 ナットランナー装置
現場の課題はこれで解決!
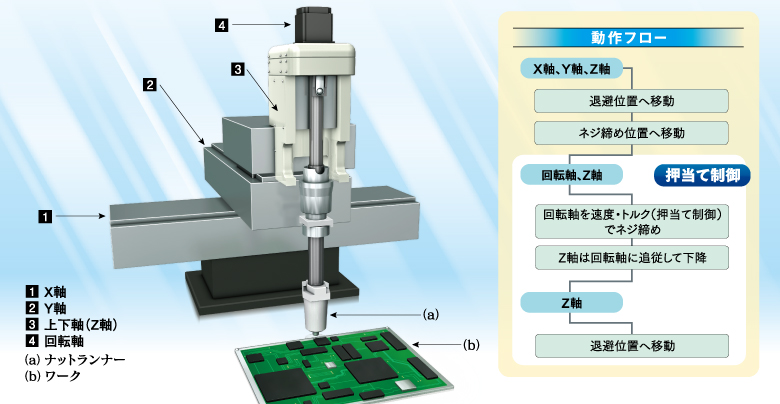

位置制御、または速度制御から押当て制御に切換えることにより、上下軸(Z軸)、回転軸をトルクセンサなしにネジ締めができます。押当て制御は速度制御、または位置決め制御から停止せずにトルク制御に切換える制御です。

| 【動作】 | |
|---|---|
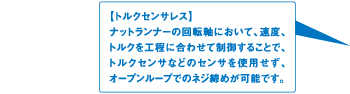
| ①→② | 上下軸:退避位置から作業位置までを移動 回転軸:サーボON状態で停止中 |
| ② | 上下軸:押当て制御に切換え 回転軸:速度制御に切換えて低速で始動 |
| ②→③ | 上下軸:ネジの仮締め開始 回転軸:中速度に切換えてネジ締め |
| ③→④ | 上下軸:ネジを一定トルクで押し付ける 回転軸:押当て制御に切換えてネジ締め |
| ④→⑤ | 上下軸:ネジを一定トルクで押し付ける 回転軸:指定トルクに変更してネジ締め |
| ⑤→⑥ | 上下軸:位置制御に切換えて退避位置まで移動
回転軸:位置制御に切換えて退避位置まで移動 |
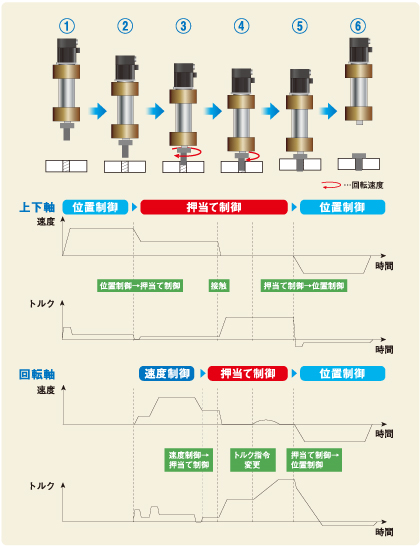

モータ極数とスロット数の組合せを最適にすることで、通電トルクリップルを大幅に低減。
ネジ締め付け時の繰り返し精度を改善することができます。
モデルシステム
機器構成
| シーケンサCPU:Q06UDEHCPU | シンプルモーションユニット:QD77MS4 | サーボアンプ:MR-J4(W3)-B |
| GOT:GOT1000シリーズ | 入出力ユニット:QX40、QY40P | サーボモータ:HG-SR,HG-KR |
| 基本ベース:Q35DB |

システム構成でサーボアンプの設定をします。
![]()
各軸のサーボアンプの設定をします。サーボアシスタント機能を使用すると、初めての方でも簡単に設定ができます。
![]()
制御モード切換え等の制御用プログラムをファンクションブロック(FB)で簡単に作成できます。