技術紹介
まるで人の「手」のようにやさしく、しっかり鏡を掴む「力覚制御技術」。
人は物を持ち上げるとき、指先の感覚でバランスを自然に調整します。ロボットの爪「タロン」がまるで人の「指」のような働きをする、それが「力覚制御技術」です。
鏡を掴むとき「1つのタロンだけが鏡にかからない」「鏡に対してタロンが斜めになっている」など、微妙なズレが生じます。鏡はお椀形の主鏡の形状に合わせで微妙にカーブしています。さらに構造がたわむこともあります。それらがズレの原因です。
ズレを補正し、バランス良く持ち上げるには3つのタロンそれぞれにかかっている荷重を正確に知る必要があります。
「力覚制御技術」は鏡を少しずつ持ち上げながら荷重を測定し、それが鏡の重さによるものか、ロボット自身の動きによるものかを判断し、タロンの動きを微妙に調整することで、鏡をしっかりとやさしく掴むことができるのです。
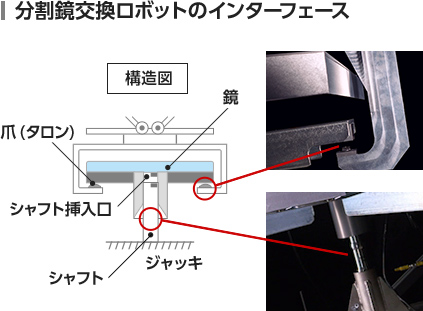
また取り付けの際はジャッキのシャフトを鏡背面の挿入口に差し込みます。少しでもシャフトと挿入口がズレれば、鏡に負荷がかかります。どんな軌道を取れば鏡に負荷をかけずにスムーズに挿入できるか、ロボット自身が判断するのです。
シャフトと挿入口の隙間はわずか0.5mmです。「力覚制御技術」は250kg程の鏡に対して、1kg以下のわずかな負荷も検知し、その負荷による構造変形の影響も考慮しながら、鏡に大きな負荷をかけずに交換作業が可能です。
取り外しも取り付けも、カメラでモニターしづらい鏡背面での作業です。人が何かを掴んだり、差し込んだりするとき、視覚情報により微妙に調整しますが、このロボットはいわば指先の感覚だけで正確に作業を行うことができるのです。
「6自由度パラレルリンク駆動」でコンパクト化とロングストロークを両立。
TMTに限らず望遠鏡では観測装置のスペースが優先されるため、その他の装置を設置できる空間は限られています。そのため今回開発したシステムもコンパクトであることが要求されました。また取り外した鏡を移動する際、万が一同じ軌道上の別の鏡がジャッキアップされていても衝突しないように安全策として、鏡を高く持ち上げる「ロングストローク」を確保する必要がありました。さらにハワイ・マウナケアでは地震が起こり、耐震性も課題のひとつでした。
これらを一気に解決したのが独自の「6自由度パラレルリンク駆動」です。鏡を掴むためのタロンは計3つです。それぞれのタロンは、各2本のアームによって上下します。アームは個別のモーターで駆動し、計6個のモーターが搭載されています。ポイントはアームをどう動かすかです。単に垂直方向にアームを上げ下げしたのでは、鏡を持ち上げた際にアームが上部に突き出し、縦方向にスペースが必要になります。
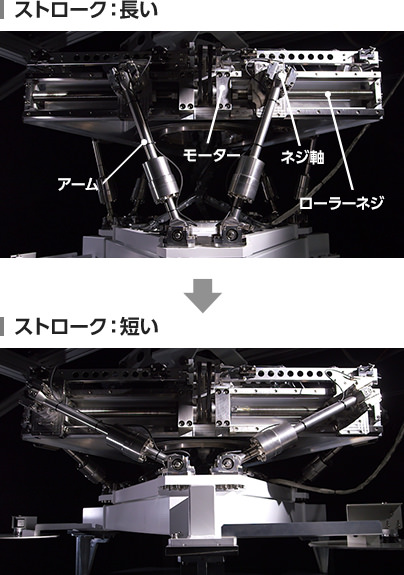
「6自由度パラレルリンク駆動」では、水平に配置されたローラーネジの上をアームと一体になったネジ軸が横方向に移動することでアームを動かします。
ネジ軸がローラーネジの中心に近いほどストロークは長く、ネジ軸が端に行くほどストロークは短くなります。逆三角形の底辺が短いほど爪先(タロン)は下に、底辺が広がるほど爪先(タロン)が上がる仕組みです。これであれば鏡を持ち上げてもアームが上に突き出すことがなく、コンパクト化とロングストロークを両立できます。
さらにローラーネジとネジ軸には非常に細かい溝が掘られており、ネジとナットのような関係になっています。もし地震が起きて電源を消失してもネジとナットのようにしっかりと固定されているので、アームが動かず鏡を落とすことがありません。