![]()
ダウンロード
制御機器 サーボシステムコントローラのサンプルライブラリを探す
設定・プログラミング支援 - サンプルプログラム・ライブラリ - サーボシステムソリューションサンプルプログラム
vol.12 走行切断装置 [NEW]
言語
日本語 英語
概要
サーボシステムソリューション(vol.12 走行切断装置)のサンプルプログラムです。

【システム構成】

«使用機器・ソフトウェア»
| シーケンサCPU:R04CPU | モーションCPU:R16MTCPU | GOT:GT27**-S | |||||||
| 基本ベース:R35B | サーボアンプ:MR-J4-B | ||||||||
| 電源ユニット:R61P | サーボモータ:HG-KR | ||||||||
| エンジニアリング環境:MELSOFT GX Works3(シーケンサ),MELSOFT MT Works2(モーションコントローラ), | |||||||||
| MELSOFT GT Works3(GOT) | |||||||||
【動作概略】
- (1) コンベアで長尺のワークが送られてきます。
- (2) コンベアが一定長ワークを送ると,カッター走行軸が始動します。
- (3) ワークの切断位置とカッター位置が同じになったところで,コンベアの速度とカッター走行軸の速度が一致します。
- (4) 速度が一致している間にカッター上下軸が始動し,ワークを切断します。
- (5) ワークの切断後,カッター走行軸は急減速して停止します。
- (6) カッター走行軸が補助軸の指令生成軸を駆動させて高速で初期位置に戻ります。
- 以上の動作を繰り返します。
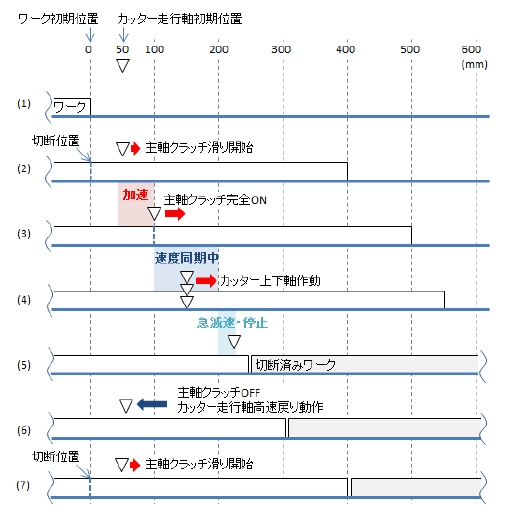
【制御のポイント】
Point1:アドバンスト同期制御を使用することで,コンベアとカッター走行軸の同期・非同期の切り換えを簡単に行うことができます。
Point2:アドバンスト同期制御のクラッチスムージング機能により,
[クラッチON 時滑り量] = [ワーク初期位置] - [カッター走行軸初期位置]の距離
と設定することで,カッターの速度がコンベアの速度と一致する場所と切断位置が同一になります。
サンプルライブラリ
| 名称 | サイズ (バイト) | 更新日 | ダウンロードファイル |
|---|---|---|---|
| vol.12 走行切断装置 | 1,622,166 | 2017-08-03 | vol12_flyingshear_a.zip |
関連マニュアル
|
|
vol.12 走行切断装置 動作説明資料(日本語版) |
|---|
著作権
三菱電機株式会社
圧縮ファイルの展開手順
任意のフォルダに、ファイルをダウンロードしてください。
ダウンロードしたファイルを解凍すると,サンプルプログラム名のフォルダが作成されます。
[解凍方法① ZIP対応の解凍機能のあるOSの場合]
| 1. | ダウンロードしたファイルを右クリックします。 |
| 2. | 「すべて展開...」を選択してください。 「すべて展開...」の表示がない場合は,解凍方法②を行ってください。 |
| 3. | 展開先を指定して、「展開」ボタンをクリックすると解凍されます。 |
[解凍方法② ZIP対応の解凍機能のないOSの場合]
| 1. | ZIP対応の解凍ツールをお持ちでない方は、解凍ツールを入手してください。 |
| 2. | 解凍ツールを使用して解凍します。 ※解凍ツールの使用に関しては、全てお客様の責任において行ってください。 |
- お問い合わせ
 購入・見積もり
購入・見積もり 仕様・機能
仕様・機能- よくあるご質問(FAQ)