![]()
ダウンロード
制御機器 サーボシステムコントローラのソフトウェアを探す
設定・プログラミング支援 - サンプルプログラム・ライブラリ - サーボシステムソリューションサンプルプログラム
vol.06 圧入装置
言語
日本語 英語
概要
サーボシステムソリューション(vol.06 圧入装置)のサンプルプログラムです。

【システム構成】
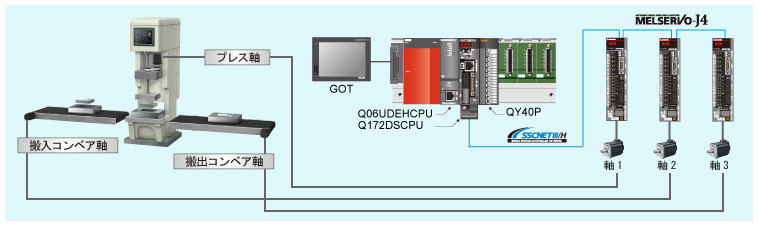
«使用機器・ソフトウェア»
| モーションCPU:Q172DSCPU | GOT:GT165*-V | サーボアンプ :MR-J4-B |
| シーケンサCPU:Q06UDEHCPU | 出力ユニット:QY40P | サーボモータ :HG-SR(B) (プレス軸は電磁ブレーキ付) |
| 基本ベース:Q35DB | ||
|
エンジニアリング環境:MELSOFT MT Works2(モーションコントローラ),MELSOFT GX Works2(シーケンサ), MELSOFT GT Works3(GOT) | ||
| モーションCPU本体OS:SW8DNC-SV22QL | ||
【動作概略】
搬入コンベアでワークを搬入してプレスでワークに圧力を加えて,はめ込みます。(圧入)
はめ込みが完了したワークは搬出コンベアにより搬出されます。
【制御のポイント】
Point1:押当て制御を使用することにより,位置決め制御中でもモータを停止させずにスムーズにトルク制御に切換えることが可能です。
Point2:位置とトルクの管理が同時にできるので,ロードセルやリニアスケールなどの外部センサを使用しないシンプルなシステム構成での圧力制御が可能となります。
Point3:トルク指令がリアルタイムに変更でき,指定トルクまでの時定数も調整できるので,多彩な圧入パターンが実現できます。またトルクフィードバックゲインの調整により押当て時の衝突負荷を軽減することができます。
サンプルライブラリ
| 名称 | サイズ (バイト) | 更新日 | ダウンロードファイル |
|---|---|---|---|
| vol.06 圧入装置 | 334,679 | 2014-11-21 | vol6_press_b.zip |
関連マニュアル
|
|
vol.06 圧入装置 動作説明資料(日本語版) |
|---|---|
|
|
vol.06 圧入装置 動作説明資料(英語版) |
著作権
三菱電機株式会社
圧縮ファイルの展開手順
任意のフォルダに、ファイルをダウンロードしてください。
ダウンロードしたファイルを解凍すると,サンプルプログラム名のフォルダが作成されます。
[解凍方法① ZIP対応の解凍機能のあるOSの場合]
| 1. | ダウンロードしたファイルを右クリックします。 |
| 2. | 「すべて展開...」を選択してください。 「すべて展開...」の表示がない場合は,解凍方法②を行ってください。 |
| 3. | 展開先を指定して、「展開」ボタンをクリックすると解凍されます。 |
[解凍方法② ZIP対応の解凍機能のないOSの場合]
| 1. | ZIP対応の解凍ツールをお持ちでない方は、解凍ツールを入手してください。 |
| 2. | 解凍ツールを使用して解凍します。 ※解凍ツールの使用に関しては、全てお客様の責任において行ってください。 |
- お問い合わせ
 購入・見積もり
購入・見積もり 仕様・機能
仕様・機能- よくあるご質問(FAQ)