![]()
ダウンロード
制御機器 サーボシステムコントローラのソフトウェアを探す
設定・プログラミング支援 - サンプルプログラム・ライブラリ - サーボシステムソリューションサンプルプログラム
vol.04 ガントリ機構を使った装置
言語
日本語 英語
概要
サーボシステムソリューション(vol.04 ガントリ機構を使った装置)のサンプルプログラムです。

【システム構成】
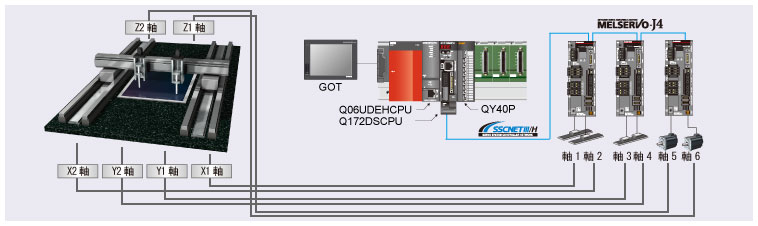
«使用機器・ソフトウェア»
| モーションCPU:Q172DSCPU | サーボアンプ:MR-J4W2-B | リニアサーボモータ:LM-H3 |
| シーケンサCPU:Q06UDEHCPU | GOT:GT16**-V | サーボモータ:HG-KR |
| 基本ベース:Q35DB | 出力ユニット:QY40P | |
|
エンジニアリング環境:MELSOFT MT Works2(モーションコントローラ),MELSOFT GX Woks2(シーケンサ), MELSOFT GT Works3(GOT) |
||
| モーションCPU本体OS:SW8DNC-SV22QL | ||
【動作概略】
本サンプルプログラムはガントリ機構の塗布装置(ディスペンサー)を想定しており,タンデム構成のX軸とマルチヘッド構成のY軸により,ノズル位置を制御して塗布動作を行います。
【制御のポイント】
Point1:X,Y軸でリニアサーボモータを使用して,位置指令をダイレクトに装置に伝え,ギアのガタやバックラッシュなどが無く高精度で高応答な位置決めを行います。
Point2:1本の固定子に沿って2つの可動子が動作するマルチヘッド構成(Y軸)とし,機械構造のシンプル化を図ります。
Point3:アドバンスト同期制御を使用した高精度な同期運転により,X軸でのタンデム駆動および,指令生成軸での補間運転を使用した,マルチヘッド構成での同期補間運転も簡単に行うことが可能です。
サンプルライブラリ
| 名称 | サイズ (バイト) | 更新日 | ダウンロードファイル |
|---|---|---|---|
| vol.04 ガントリ機構を使った装置 | 465,663 | 2013-05-09 | vol4_dispenser_a.zip |
関連マニュアル
|
|
vol.04 ガントリ機構を使った装置 動作説明資料(日本語版) |
|---|---|
|
|
vol.04 ガントリ機構を使った装置 動作説明資料(英語版) |
著作権
三菱電機株式会社
圧縮ファイルの展開手順
任意のフォルダに、ファイルをダウンロードしてください。
ダウンロードしたファイルを解凍すると,サンプルプログラム名のフォルダが作成されます。
[解凍方法① ZIP対応の解凍機能のあるOSの場合]
| 1. | ダウンロードしたファイルを右クリックします。 |
| 2. | 「すべて展開...」を選択してください。 「すべて展開...」の表示がない場合は,解凍方法②を行ってください。 |
| 3. | 展開先を指定して、「展開」ボタンをクリックすると解凍されます。 |
[解凍方法② ZIP対応の解凍機能のないOSの場合]
| 1. | ZIP対応の解凍ツールをお持ちでない方は、解凍ツールを入手してください。 |
| 2. | 解凍ツールを使用して解凍します。 ※解凍ツールの使用に関しては、全てお客様の責任において行ってください。 |
- お問い合わせ
 購入・見積もり
購入・見積もり 仕様・機能
仕様・機能- よくあるご質問(FAQ)