モーションユニット 特長(PLCopen®モーション制御FBモード)

- ラインアップ
- ユニット間同期
- 加減速処理
- 同期制御
- タッチプローブ機能
- サーボシステムレコーダ
- CC-Link IE TSN安全通信機能
- エンジニアリング環境
- GX LogViewer
- システムシミュレータ
- セキュリティキー認証機能
- クイックスタートガイド
- 仕様一覧
- 関連リンク


- ● モーションユニットはST言語、シーケンサCPUはラダー、FBD/LD、ST言語でプログラミングします。
- ● 国際的な標準規格であるPLCopen ® Motion Control FBのライブラリを使用してプログラムできます。
- ● ロギングしたデータからGX LogViewerで運転状態を解析でき、デバッグの効率アップになります。
![シーケンサCPUでプログラムする例 [単独でプログラムする例]](./assets/img/feat_fb_1.png)
シーケンサCPUだけでプログラムできるため、設計者の負担軽減ができます。
![各ユニットでプログラムする例 [プログラムを分散する例]](./assets/img/feat_fb_2.png)
モーションユニットで演算処理、モーション制御を行うため、シーケンサCPUとの負荷分散が可能です。
ラインアップ

RD78GHV
RD78GHW
- ● 最大制御軸数:
RD78GHV:128軸/ユニット
RD78GHW:256軸/ユニット - ● 最小演算周期 *1 :31.25 [μs]
- ● ST言語のプログラム容量:
内蔵ROM最大64 [MB] + SDメモリカード
*1. 最小演算周期は機種や制御軸数により異なります。

RD78G4/RD78G8
RD78G16/RD78G32
RD78G64
- ● 最大制御軸数:
RD78G64:64軸/ユニット - ● 最小演算周期 *1 :62.5 [μs]
- ● ST言語のプログラム容量:
内蔵ROM最大16 [MB] + SDメモリカード
*1. 最小演算周期は機種や制御軸数により異なります。
性能
PLCopen®モーション制御FBモードのモーションユニットRD78GHでは性能が従来比約4~8倍になります。
サーボアンプからのデータ、入出力信号の授受を高速にでき、タクトタイムの短縮に貢献します。
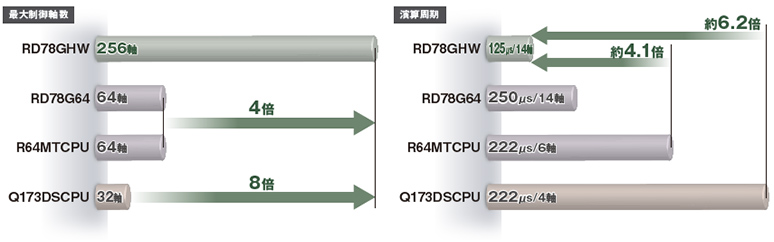



*1. RD78GH使用時
ユニット間同期
同一ベース上の複数のモーションユニット間で制御タイミングを合わせる機能です。
- ● 装置ごとにモーションユニットを使用している場合、装置間の同期をとることができます。

加減速処理
加減速処理は、台形加減速、ジャーク加減速、加減速時間一定方式があり、用途に合わせて使用します。
台形加減速方式
加速度がステップ的に変化する加減速方式です。
ワークを搭載した装置が急加速すると、衝撃を受け、ワークが前後に大きく揺れます。衝撃、振動を小さくするためには加速度を小さくする必要があり、目的速度に到達する時間は長くなります。
速度は台形波形になります。
ジャーク加減速方式
装置が揺れないようにゆっくり加速し、加速中はジャークを保持、一定速度に移る場合、ジャークを戻します。上手にジャーク調整をすれば、なめらかな加速を実現しつつ、目的速度までの時間も短縮することができます。
ジャークはアクセルに相当しています。
速度はS字波形になります。

加減速時間一定方式
指令速度に関係なく指定した加減速時間を入力して加減速を行います。
- *1. 加速度を入力
- *2. 加速時間を入力
同期制御
ファンクションブロック (FB) を使用することで、ギア、シャフト、変速機、カムなどの機械機構をソフトウェアに置き換えて制御します。
- ● 同期制御と通常の位置決め制御の混在が可能です。
- ● 同期エンコーダを入力軸とする制御も可能です。
- ● 出力軸はカムデータ (演算プロファイル) に合わせたカム動作となります。
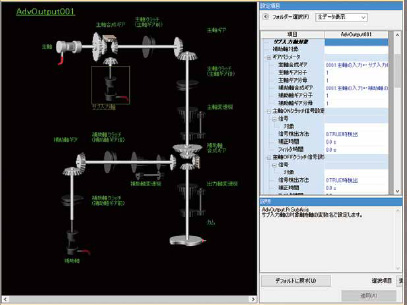
組み合わせを自由に選択できる同期制御
同期モジュールの接続個数、組合せを自由に選択できるため、効率の良い同期制御ができます。
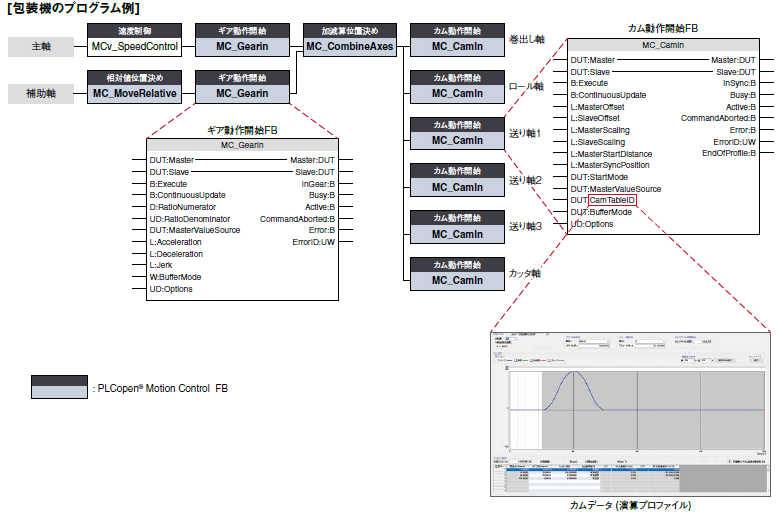
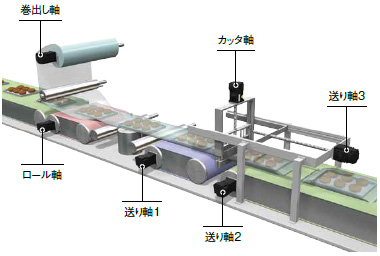
[包装機]
巻出し軸からカッタ軸までの全軸を主軸に同期させて同期制御が行えます。
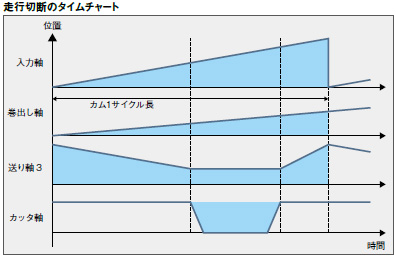
カッタ軸と送り軸3で走行切断を行えます。
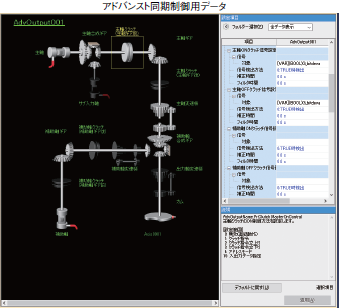
グラフィカルに設定できるアドバンスト同期制御FB
同期モジュールをパラメータで設定した後、アドバンスト同期制御FBを始動するだけで同期制御を実現できます。
補助軸、クラッチ、ギア、変速機などの同期モジュールをグラフィカルに設定できます。
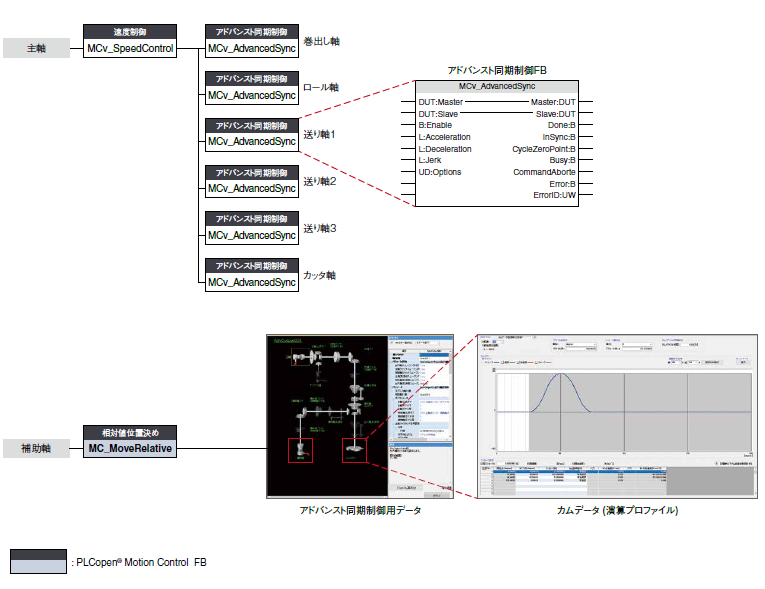
アドバンスト同期制御用データ
同期モジュールを選択した箇所はハイライトになり、グラフィカルなイメージで確認できます。
- ● 入力軸データ
- ● 同期パラメータ(出力軸)
- ● 補助軸のデータ
- ● クラッチのデータ
- ● ギアのデータ
- ● 変速機のデータ
- ● カムデータ (演算プロファイル)
- ● カム曲線種別
クラッチ
クラッチ信号のON/OFFを行うことにより、主軸入力/補助軸入力からの指令パルスの伝達/切離しを行います。
出力軸の運転/停止を制御する場合に使用します。
クラッチは、主軸クラッチと補助軸クラッチにそれぞれ設定できます。
| クラッチON制御モード | クラッチOFF制御モード |
|---|---|
| 無効 (直結動作) | 無効 (OFF制御無効) |
| クラッチ指令 | クラッチ指令(ワンショット動作) |
| クラッチ指令立上り | クラッチ指令立上り |
| クラッチ指令立下り | クラッチ指令立下り |
| アドレスモード | アドレスモード |
| 入出力データ指定 | 入出力データ指定 |
クラッチはアドバンスト同期制御FBで使用できます。
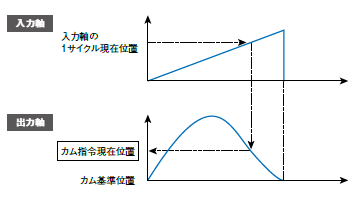
同期制御の再開
緊急停止などで同期制御中に同期位置がずれた場合、同期制御解析モードを使用することで同期制御を再開することができます。
同期制御解析モードでは、入力軸を基準としたカム指令現在位置に更新します。更新されたカム指令現在位置を使用して、同期制御前の同期位置合わせができます。
同期エンコーダ
同期エンコーダを実エンコーダに割り付けてファンクションブロック(FB)を作成することで、簡単に同期制御を実現できます。
同期エンコーダの分解能により、指令パルスの重みをギア動作のFB、またはパラメータにて換算できます。
サーボアンプ経由でインクリメンタル同期エンコーダ *1 を接続できます。

*1. 絶対位置同期エンコーダを接続する場合は、HKシリーズサーボモータのエンコーダを使用してください。
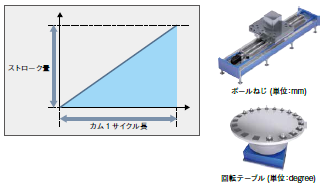
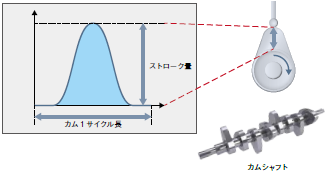
カムデータ (演算プロファイルデータ)
カム制御では、動作に合わせたカムデータ (演算プロファイルデータ *1 )を作成することにより、出力軸を制御します。
*1. 波形データの総称を演算プロファイルデータと呼び、様々な用途に使用します。
■カム動作
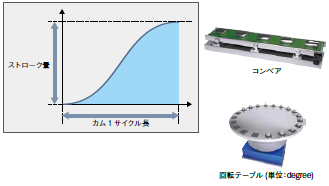
カム動作には直線動作、往復動作、送り動作があり、用途に合わせて選択できます。
直線動作
直線動作をします。
ボールねじ、回転テーブルなどに使用します。
往復動作
始点と終点が同じ位置になる動作をします。
機械的なカムはこれに相当します。
送り動作
始点と終点が違う位置になる動作をします。
一定量送る動作や間欠動作に使用します。
送り動作の終点を任意の位置にすることが可能です。
タッチプローブ機能
サーボアンプへのトリガ入力を検出するタイミングで、任意のデータをラッチする機能です。
ラッチしたデータから補正量を計算して補助軸にて、補正します。
1 μsの高精度タッチプローブが可能です。
サーボシステムレコーダ
サーボシステムレコーダ機能は、エラー発生時、全てのサーボアンプの情報をモーションユニットにおいて自動で収集します。
トラブル発生時の指令値やフィードバック値の収集結果をもとに、トラブルシュートに役立てられます。
- プログラムレスで位置、速度、トルクデータなどの情報を収集できます。
- 全軸のデータを収集するため、原因がエラー発生軸以外でも究明がしやすくなります。
- 連動レコーディング機能により、他のレコーディング対応機器で異常が発生した場合でも、データを収集します。
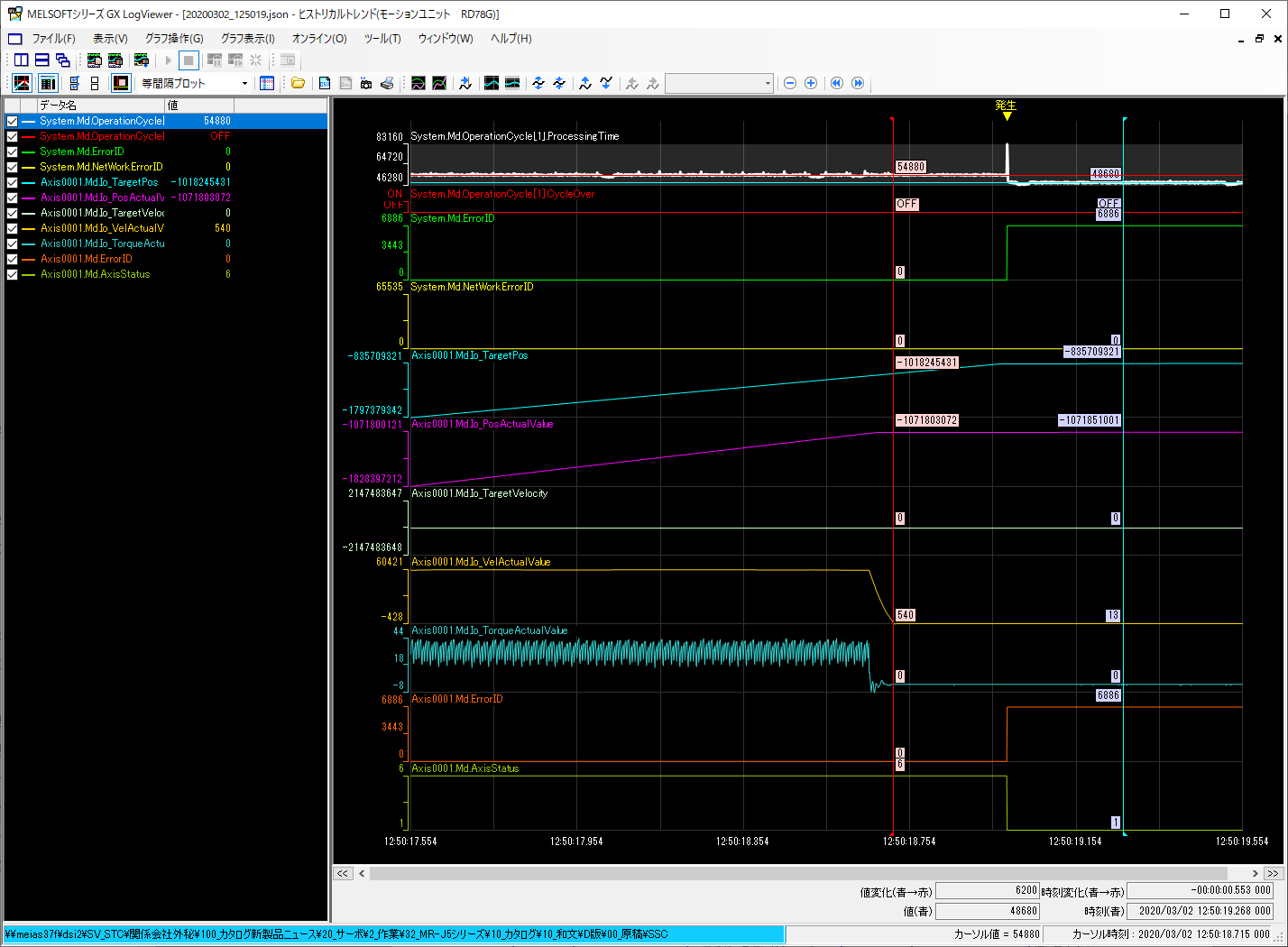
GX LogViewer
収集したデータはGX LogViewerで確認できます。
エラー発生時前後の各ユニットの運転状態を波形表示できるため、より詳細な解析ができ、原因究明、要因分析に役立ちます。
[特長]
- 収集したデータやイベントをグラフィカルに表示
- 自動調整機能やドラッグ操作により簡単にグラフ調整が可能
![三次元板金展開システム CamMagic SMOPlus [SpaceClaimSMOPlus]](./assets/img/feat14.gif)
CC-Link IE TSN安全通信機能
CC-Link IE TSNは一般制御と安全制御を混在させたシステムを構築することができます。
安全CPUは安全リモートI/O経由で取り込んだ安全信号をチェックし、サーボアンプに安全信号 (STOなど) を出力します。
そのため、安全コントローラやサーボアンプへの安全信号の配線が不要になります。
*1. 対応するサーボアンプについては、 「安全監視機能」 を参照してください。
エンジニアリング環境
GX Works3で、シーケンスプログラム作成はもちろん、モーションユニットのパラメータ設定からサーボ調整、デバッグまで様々なシーンに対応でき、エンジニアリング環境による快適な設計環境を構築できます。
MELSOFT GX Works3
様々な機能をGX Works3にまとめることで、プロジェクト作成が簡単になるばかりではなく開発プロセスに統一性を持たせることができます。

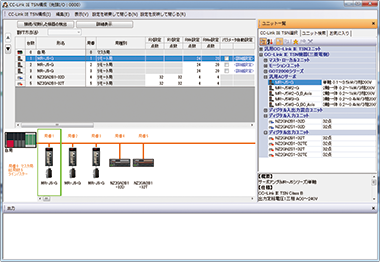
■ネットワーク構成設定
【ネットワーク構成設定】
- ● ドラッグ&ドロップとグラフィカルな画面表示により、ネットワークの直感的な設定環境を実現しました。
【自動検出】
- ● 接続/切断した機器検出]ボタンをクリックすると、デバイス局の接続状況を自動検出して、CC-Link IE TSN構成を生成し画面表示します。
■ST言語による簡単プログラミング
- ● 構造化プログラミングにより、プログラム機能ごとにモジュール化でき、可読性が向上します。
- ● ST言語によるプログラムの部品化により、プログラム資産の再利用性が向上します。
- ● GX Works3の操作性統一により、迷わずに感覚的に操作できます。
- ● ライブラリラインアップの充実により、プログラム作成工数を削減できます。
- ● プログラム部品のドラッグ&ドロップによるプログラミングの簡素化ができます。
- ● GX Works3のシミュレータにより、デバッグ段階から実機なしでプログラムの動作を確認でき、立上げ時間の短縮を図れます。
■ 関連動画

■ラベルを使用したプログラミング
- ● モーションユニットで制御する軸、入出力信号などをラベル変数として管理するため、プログラムの流用が容易で、作業効率が向上します。
- ● モーションユニットで追加したグローバルラベルは、シーケンサCPUのプログラムで使用できます。
GX LogViewer
シーケンサ、モーションユニットのグラフデータをGX LogViewerで確認することで、データ解析や表示の連携が容易になります。
GX LogViewerには、オフラインで使用するデータロギングとリアルタイムモニタがあります。
データロギング機能
データロギング機能は、エンジニアリングツールから書き込んだロギング設定(トリガ条件やデータ収集条件)に基づき、モーションユニットのデータを指定の間隔で収集し、結果をデータロギングファイルに保存する機能です。
モーションユニットでは、最大10設定分のデータロギングを同時に実行できます。
エラー発生前後の運転状態を波形表示できるため、より詳細な解析ができ、原因究明、要因分析に役立ちます。
リアルタイムモニタ
最大32点のモーションユニットの収集データをリアルタイムに表示できます。
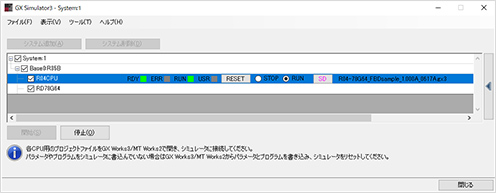
システムシミュレータ
セキュリティキー認証機能
セキュリティキー認証機能により、セキュリティキーを登録していないパソコンではプログラムを開けないようにロックできます。
また、セキュリティキーを登録していないモーションユニットではプログラムを実行できないため、お客様の技術(ノウハウ)の流出を防ぎます。

クイックスタートガイド
仕様一覧
| モーションユニット | |||||||
|---|---|---|---|---|---|---|---|
| RD78GHW | RD78GHV | RD78G64 | RD78G32 | RD78G16 | RD78G8 | RD78G4 | |
| 最大制御軸数 | 256 | 128 | 64 | 32 | 16 | 8 | 4 |
| 最小演算周期[μs] ※1 | 31.25 | 62.5 | |||||
| サーボアンプ接続方式 | CC-Link IE TSN (通信速度:1 Gbps/100 Mbps) | ||||||
| 接続サーボアンプ | MR-J5-G,MR-J5W-G,MR-J5D-G4 詳細はこちら | ||||||
| 最大局間距離[m] | 100 | ||||||
| 制御方式 | 位置制御,速度制御,トルク制御,同期制御,カム制御 | ||||||
| 位置決め制御 | 位置制御,直線補間 (最大4軸),円弧補間 (2軸) | ||||||
| 加減速処理 | 台形加減速,ジャーク加減速,加減速時間一定方式 | ||||||
| プログラム言語 | シーケンサCPU:シーケンスプログラム,FBD/LD言語,ST言語 モーションユニット:ST言語 |
||||||
| 原点復帰機能 | ドライバ式原点復帰 ※2 | ||||||
| 手動制御 | JOG運転 | ||||||
| 補助機能 | 緊急停止,ハードウェアストロークリミット,ソフトウェアストロークリミット, |
||||||
| 共通機能 | タッチプローブ,軸エミュレート,イベント履歴,サーボデータのモニタリング, サーボシステムレコーダ,ユニット間同期 |
||||||
| エンジニアリング環境 | MELSOFT GX Works3 | ||||||
| 入出力占有点数 | 32点+空スロット16点 | 32点 | |||||
| DC5 V内部消費電流[A] | 2.33 | 1.93 | |||||
| 質量[kg] | 0.44 | 0.26 | |||||
- ※1: 最小演算周期は機種や制御軸数により異なります。
- ※2: ドライバ(サーボアンプ)に設定された原点復帰方式を使用します。