
3台のGPSアンテナ、IMU、カメラ、レーザースキャナーを一体化したユニットを、天板上に装備。すべての機器は自社製造工場内で調整済みですので、複雑な車両ぎ装が不要です。トライアングルに配置した3台のGPSが、高精度に車両姿勢を捉え、GPS可視区間で、道路面と道路周辺の3次元空間を絶対精度10cm以内、相対精度1cm以内の高精度で計測が可能です。
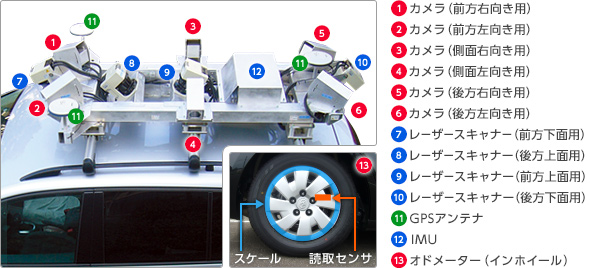
タイヤ内側に配置したオドメーターが、微小な車体の動きも正確に捕捉。トンネルの中など、GPSが使用できない状態での測定精度維持に大きな効果を発揮します。
一般道(~60km/h)でも高速道路(~80km/h)でも交通規制することなく高精度で計測できます。速度による精度劣化はありません。
高精度な車両姿勢計測により、精緻なレーザ計測を実現。たとえば、同路面やトンネル覆工面も精細に捉え,経年変化箇所の可視化に役立ちます。
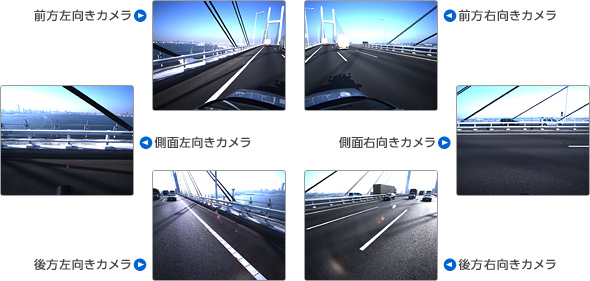
視野角(水平方向80度、垂直方向64度)で500万画素の高精細カメラを、車両の前後左右計6台まで配置して全周囲(360度)を撮影でき、進行方向裏側や側面の地物なども一度の走行で撮影できます。
道路面と道路周辺を計測するレーザースキャナーは、計4台まで配置できるので、一度に高密度なレーザー点群が取得出来ます。
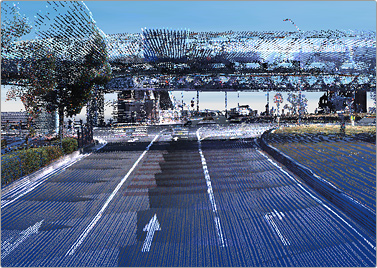
取得したレーザー点群にカメラの画像を重畳することで、レーザー点群のカラー化が可能です。
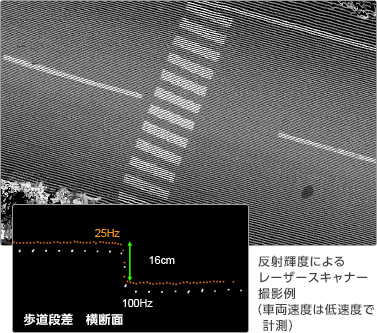
スキャン回転数を100→25Hzに変更することにより、横断方向の点密度をあげることができます。(この時進行方向の点密度は低下します。)
道路横断形状をより正確に把握できます。
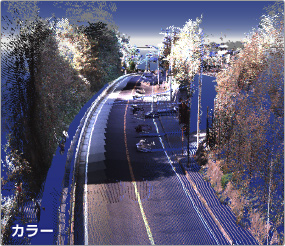
【カラー点群メリット】
・フルカラーでビジュアル的に強い
・わかりやすい
・低い位置の標識なら内容を推測できる
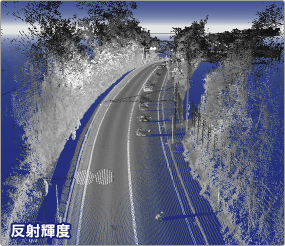
【反射輝度メリット】
・日光の影響をほとんど受けない
・夜間でも取得できる
・演算時間が短い
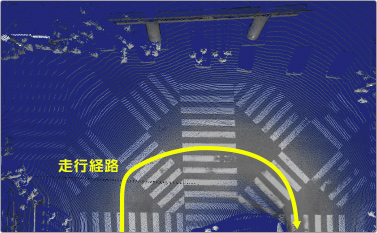
曲がりながらの計測でも白線のゆがみは見られません。
鳥居の点群も曲がりながら取得していますが、形状は保たれています。

全周囲カメラの連接・搭載が可能です。
(Point Grey Research製品)
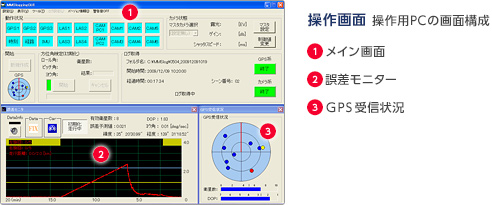
機器の動作状況、GPS受信状況、走行経路表示に加え、予測誤差をモニターにグラフ表示されるので、測量の高度な専門知識や経験がなくても、精度を管理して計測することが出来ます。


機器の小型化により、後部座席も使用できるようになりました。ご相談に応じて特殊仕様も承ります。
また、タッチパネルとワイヤレスキーボード操作で助手席での運用が可能になりました。
面補正パラメータによるGPS補正(FKP方式)により、長距離の走行においても安定した精度が得られます。
[GPS補正とは]
GPS測位では自然現象等により測位誤差が生じます。全国に配置された電子基準点データを用いてGPS測位データを補正することにより、正確な位置情報を得ることが出来ます。MMSでは測位誤差を広範囲にわたり均一に補正できるFKP方式を採用することで、高精度GPS測位を実現しております。
後処理ソフトに含まれる『基準点またぎ機能』を利用することにより、電子基準点位置を意識することなく、連続して計測が可能です。

各種センサーの搭載等お客様のご要望に応じたカスタマイズにも対応できます。
自社内で徹底した品質管理を行うなど、お客様の計測作業を安心の保守サービスでサポートいたします。海外製品に比べ万一のトラブル発生時も国内工場で速やかに対応できるので、安心してご利用いただけます。
※計測精度は良好なGPS受信を前提といたします。
※計測点密度は速度により異なります。
| ▲ ページトップに戻る|