モーションユニット 特長

FX5-80SSC-G/FX5-40SSC-G

コンセプト

特長
CC-Link IE TSN対応サーボアンプと組み合わせて高性能なサーボシステムを構築し、装置の性能アップに貢献します。
- ● 位置決め、同期、カム、速度・トルクなどの高度なモーション制御ができます。
- ● CC-Link IE TSN経由でリモートI/O、インバータFR-A800-GNなどを接続でき、各ユニットの内容をCPUユニットで参照できます。
- ● IP通信対応機器を接続できるため、自由度の高いシステムを構築できます。
- ● 従来のシンプルモーションユニットのプロジェクトを活用できます。
高度なモーション制御とコストパフォーマンスを追求したユニットです。
スタンドアロンや小規模システムを構築するために必要な性能と機能を搭載しています。

FX5-40SSC-G
FX5-80SSC-G
- ● 最大制御軸数:
FX5-40SSC-G: 4軸/ユニット、
FX5-80SSC-G: 8軸/ユニット - ● 最小演算周期 *1 :
500 [μs] - ● 最大接続台数 *2 :
4台/システム - ● 接続サーボアンプ
MR-J5-G MR-J5D-G4
- *1. 最小演算周期は機種や制御軸数により異なります。
- *2. モーションユニットとFX5-CCLGN-MS (マスタ局) 1台の合計です。
プロジェクト流用
シンプルモーションユニットのプロジェクトを有効活用してプログラムの開発工数の削減と開発期間の短縮ができます。
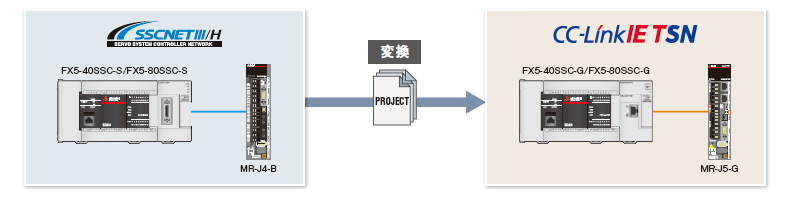
- * ネットワーク、サーボアンプなどのパラメータ設定が必要です。
位置決め制御
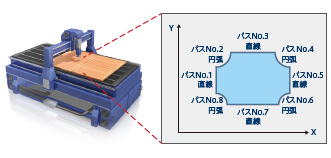
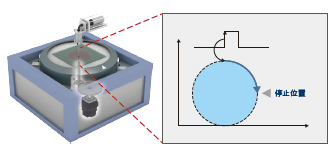
直線補間、円弧補間を含めた連続軌跡、速度位置切換えを制御できます。
直線補間

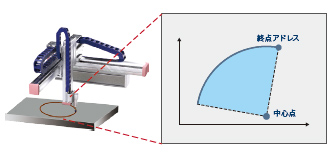
円弧補間
軌跡制御
速度・位置切換え
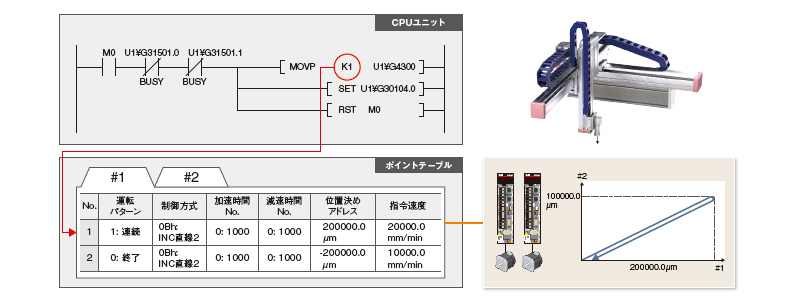
プログラム
シーケンスプログラムからポイントテーブル方式の位置決めデータを始動することにより、簡単に位置決め制御が可能です。
直線補間、2軸円弧補間、定寸送り、および連続軌跡など、豊富な制御で様々な用途に対応できます。
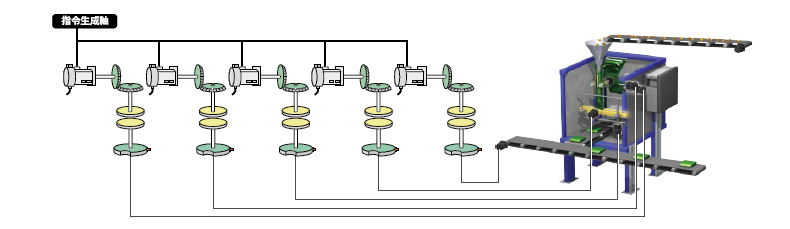
アドバンスト同期制御
ギア、シャフト、クラッチ、変速機、カムなどの機械機構をソフトウェアに置き換えた制御です。
- ● 軸ごとに同期制御の始動、停止ができ、同期制御軸と位置決め制御軸の混在が可能です。
- ● 入力軸に指令生成軸、サーボ入力軸、同期エンコーダ軸を設定できます。
- ● 出力軸はカム動作になります。カム動作には直線動作、往復動作、送り動作があります。
- ● サーボアンプMR-J5-G(-RJ)/MR-J5W2-G経由でインクリメンタル同期エンコーダ *1 を接続できます。
- *1. 絶対位置システムを構築する場合は、HKシリーズサーボモータのエンコーダを使用してください。
- [指令生成軸とは]
- 指令生成のみ行なう軸です。サーボアンプが接続された軸とは独立して制御することができます。(制御軸にカウントされません。)
パラメータ設定
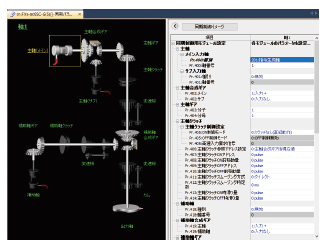
同期制御パラメータに入力軸、出力軸、ギア、クラッチなどのパラメータを設定して、同期制御始動信号をオンするだけで、同期制御を実行します。
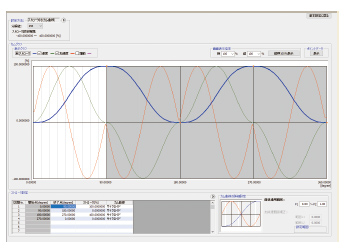
カムデータ曲線をマウスでドラッグ&ドロップして移動すると、マウスの位置に合わせて曲線も変化します。
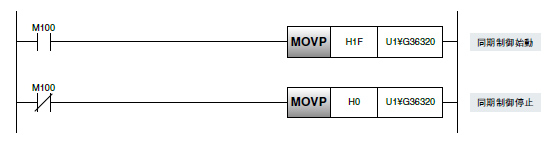
始動/停止
出力軸ごとに同期制御パラメータを設定し、同期制御を始動します。
同期制御信号をオンすると、同期制御パラメータが解析され同期制御中となります。出力軸は入力軸の運転に同期して動作します。
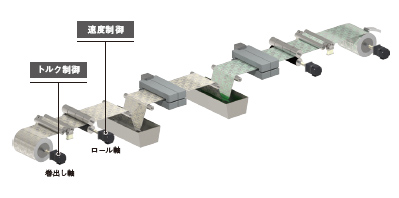
速度・トルク制御
速度制御/トルク制御
速度制御は速度指令に追従して速度を一定に制御し、トルク制御はトルク指令に追従してトルクを一定に制御します。
巻出し、巻取りなどの張力制御にモーションユニットを使用することができます。
また、速度・トルク制御中も現在位置管理を実施しているため、位置制御に戻した後も、絶対位置座標での位置決めが可能です。
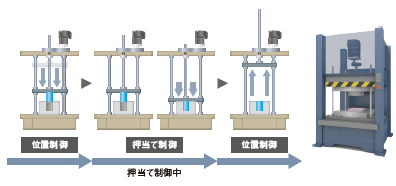
押当て制御
押当て制御は位置決め制御中にトルク制御に切り換える制御です。
- ● 押当て制御中も現在位置管理をしているため、位置制御に切り換えてもスムーズに位置決めができます。
- ● 位置制御からサーボモータを停止せずに押当て制御にショックなく切り換ります。
補助機能
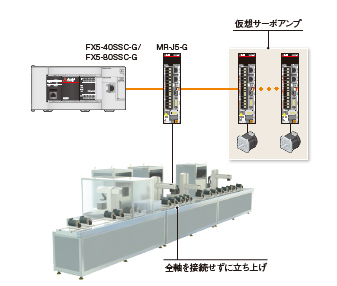
仮想サーボアンプ
サーボアンプを接続していなくても仮想的に (接続しているものとみなして) 動作します。仮想サーボアンプ軸を同期制御のサーボ入力軸として使用することで、仮想的な入力指令で同期制御ができます。また、サーボアンプ未接続の軸をシミュレーション動作させる用途にも使用できます。
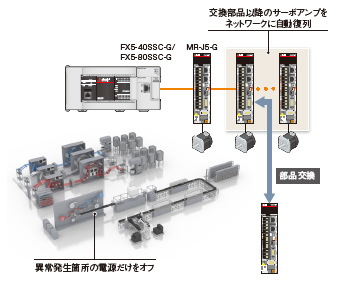
自動復列
データリンク異常により解列されたリモート局が正常になると、自動的にネットワークに復列してデータリンクを再開する機能です。 システムの電源をオフできないラインや装置では、異常が発生した場合、対象装置のみ電源をオフして部品を交換できます。
バッテリレス
モーションユニット、サーボアンプがバッテリなしで動作できます。 *1 バッテリ交換作業やバッテリの在庫管理が不要となり、メンテナンスコストを削減します。
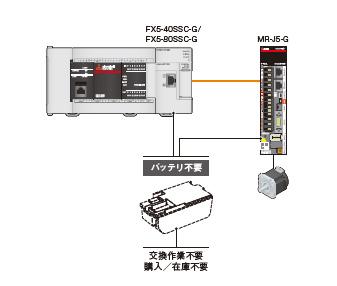
- *1. ダイレクトドライブモータではバッテリを必要とする場合があります。
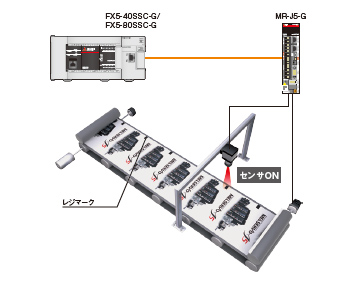
マーク検出
サーボアンプへのトリガ入力を検出するタイミングで、任意のデータをラッチする機能です。
ラッチしたデータから補正量を計算して補助軸にて補正します。
1 μsの高精度マーク検出に対応しています。 機能UP
エンジニアリング環境
MELSOFT GX Works3
GX Works3は、プロジェクト作成とメンテナンス作業を容易にする機能を搭載しています。
GX Works3、容量選定 Motorizer、FA統合機種選定 FA Integrated Selection Toolなどのエンジニアリングツールを活用して、モーションユニット、サーボアンプ、サーボモータのパラメータ設定から保守までのシーンをサポートします。




システム設計

- ● ユニット構成
- ● ネットワーク構成
- ● サーボアンプのデータ設定
- ● リモートI/Oの設定
プログラミング (位置決め)

- ● ラダー、SFC、FBD/LD言語でプログラミング
- ● 位置決めデータ設定
- ● オフラインシミュレーション、指令速度の自動計算
プログラミング (同期制御)

- ● 同期制御パラメータ
- ● カムデータ作成、カムデータ一覧
デバッグ/メンテナンス

- ● イベント履歴
- ● 現在値履歴、始動履歴、軸モニタ
- ● サーボモニタ
- ● デジタルオシロ
生産現場とITシステムを融合するオープン統合ネットワークCC-Link IE TSN
CC-Link IE TSNは、サイクリック通信でリアルタイム性を保証した制御を実施しながら、ITシステムとの情報通信が混在可能なネットワークです。
多様な機器を用いたフレキシブルなシステム構築が可能で、優れたメンテナンス機能を備えているため、工場全体のIIoTインフラ構築に最適です。
- *TSN: Time Sensitive Networking
- *IIoT: Industrial Internet of Things


サーボアンプMELSERVO-J5

サーボアンプMELSERVO-J5シリーズは独自の制御エンジンを更に進化させた業界最高レベルの高性能サーボアンプです。
CC-Link IE TSNと接続でき、高速・高精度なモーション制御が可能です。
多軸一体サーボアンプMR-J5W-G、MR-J5W-BやドライブユニットMR-J5D-G4のご使用により、省スペース、省配線、低コストを実現できます。
- *1. 31.25 μsはMR-J5-G/MR-J5D1-G4の場合です。



仕様一覧
| モーションユニット | |||||
|---|---|---|---|---|---|
| FX5-40SSC-G | FX5-80SSC-G | ||||
| 最大制御軸数 | 4軸 | 8軸 | |||
| 演算周期 (演算周期設定) [μs] | 500,1000,2000,4000 | ||||
| サーボアンプ接続方式 | CC-Link IE TSN (通信速度:1 Gbps/100 Mbps) | ||||
| 接続サーボアンプ | MR-J5-G,MR-J5W-G,MR-J5D-G4 詳細はこちら | ||||
| 補間機能 | 直線補間 (最大4軸),2軸円弧補間 | ||||
| 制御方式 | 位置決め制御,軌跡制御 (直線,円弧とも設定可),速度制御,速度・トルク制御,同期制御, 押当て制御 |
||||
| 加減速処理 | 台形加減速,S字加減速 | ||||
| 補正機能 | バックラッシュ補正,電子ギア,近傍通過 | ||||
| 同期制御 | 同期エンコーダ入力,指令生成軸,カム,位相補正 | ||||
| カム制御 | カム登録数 ※1 | 最大128個 | |||
| カムデータ形式 | ストローク比データ形式,座標データ形式 | ||||
| カム自動生成 | ロータリーカッター用カム自動生成 | ||||
| 位置決め制御方式 | ポイントテーブル⽅式 | ||||
| 制御単位 | mm,inch,degree,pulse | ||||
| 位置決めデータ数 | 600データ (位置決めデータNo.1 ~ 600)/軸 (MELSOFT GX Works3,シーケンスプログラムで設定可能) |
||||
| バックアップ | パラメータ,位置決めデータ,ブロック始動データはフラッシュROMで保存可 (バッテリレス) | ||||
| 原点復帰 | ドライバ原点復帰式 ※2 | ||||
| 位置決め制御 | 直線補間制御 (最⼤4軸 ※3 ,(合成速度,基準軸速度)),定寸送り制御 (最⼤4軸), 2軸円弧補間制御 (補助点指定,中⼼点指定),速度制御 (最⼤4軸), 速度・位置切換え制御 (INCモード,ABSモード),位置・速度切換え制御 (INCモード), 現在値変更 (位置決めデータ指定,現在値変更用始動番号指定) NOP命令,JUMP命令 ,LOOP,LEND, ブロック始動,条件始動,ウェイト始動,同時始動,繰り返し始動 |
||||
| 手動制御 | JOG 運転,インチング運転,⼿動パルサ運転 (1台接続可能 (インクリメンタル), 単位倍率: 1~10000倍,CPU経由 (バッファメモリ)) |
||||
| 速度・トルク制御 | 位置ループを含まない速度制御,トルク制御,押当て制御 | ||||
| 絶対位置システム | あり | ||||
| 同期エンコーダ運転機能 | 4台使用可能 (サーボアンプ経由,CPU経由) | ||||
| 速度制限 | 速度制限値,JOG速度制限値 | ||||
| トルク制限機能 | トルク制限値同一指定,トルク制限値個別指定 | ||||
| 緊急停止 | バッファメモリ経由,有効/無効の切換え機能あり | ||||
| ソフトウェアストロークリミット機能 | 送り現在値で可動範囲チェック,送り機械値で可動範囲チェック | ||||
| ハードウェアストロークリミット機能 | あり | ||||
| 速度変更 | あり | ||||
| オーバライド | 0 ~ 300 % | ||||
| 加減速処理変更 | 加減速時間 | ||||
| トルク制限値変更 | あり | ||||
| 目標位置変更 | 目標位置のアドレス,目標位置への速度の変更が可能 | ||||
| Mコード出力機能 | あり | ||||
| その他機能 | ステップ機能 | 減速単位ステップ,データNo. 単位ステップ | |||
| スキップ機能 | CPU経由,外部指令信号経由 | ||||
| パラメータ初期化機能 | あり | ||||
| 外部入力信号設定機能 | CPU経由,サーボアンプ経由 | ||||
| マーク検出機能 | 常時検出モード,指定回数モード,リングバッファモード | ||||
| マーク検出信号 | サーボアンプの制御軸数分 | ||||
| マーク検出設定 | 16設定 | ||||
| 任意データモニタ機能 | 最大4点/軸 | ||||
| 機能安全 | サーボアンプのDI/O接続 ※4 | ||||
| 自動復列 | あり | ||||
| デジタルオシロ機能 | ビットデータ16CH,ワードデータ16CH ※5 | ||||
- ※1: カム登録数はメモリ容量、カム分解能、座標数により変化します。
- ※2: ドライバ (サーボアンプ) に設定された原点復帰方式を使用します。
- ※3: 4軸直線補間制御は基準軸速度のみ有効です。
- ※4: 対応バージョン1.001以降のモーションユニットと安全増設ユニットの組合せが可能です。
- ※5: ワード8CH、ビット8CHまでのデータをリアルタイム波形表示可能です。