モーションコントローラ 特長

R64MTCPU/R32MTCPU/R16MTCPU

- コンセプト
- 特長
- CPUバッファメモリ
- モーションSFC
- SSCNETIII/H
- 位置決め制御
- アドバンスト同期制御
- 高度な圧力制御
- 多軸調整機能
- サーボシステムレコーダ
- Gコード制御
- マシン制御機能
- 光分岐ユニット
- 機能一覧
- 関連リンク
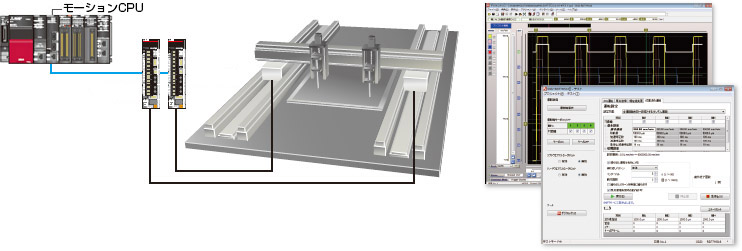
コンセプト

機械制御のシーケンサ実行エンジンと、モーション制御の実行エンジン。「MELSEC iQ-Rシリーズ」は、2つのエンジンを高速システムバスでデータ連携し、それぞれが得意とする制御の分散処理を実現しました。シングルエンジンに比べ、負荷変動のある装置や軸数の多い装置においても負荷を分散できるため、持てる性能を最大限に発揮できます。

業界最高水準の性能を実現するとともに、「人」、「環境」にも配慮したサーボアンプ「MR-J4シリーズ」。光ネットワーク「SSCNETⅢ/H」で接続することで、サーボアンプの実行エンジンと高分解能エンコーダを使った高速・高精度制御を実現します。
充実したラインアップからお客様の装置に合わせて最適なエンジンの組み合わせを選択することで、無駄なコストを抑えながら性能を最大限に発揮。装置の性能アップに加えて、設計、デバッグの効率アップが図れます。

時間と手間のかかるプログラム開発は、生産性を大きく左右します。「MELSEC iQ-Rシリーズ」は、開発、設計、デバッグ、立ち上げにいたるまで一挙に効率化します。

iQ Platformならではのデュアルで駆動するエンジンを搭載した「MELSEC iQ-Rシリーズ」。その可能性をさらに広げるのが、パートナー企業との連携です。たとえば、ステッピングモータ、ダイレクトドライブモータをはじめとしたパートナー製品も多彩にご用意して、装置革新を加速します。
特長
- 位置決め、速度、トルク、押当て、アドバンスト同期、カムなどの幅広い制御により、X-Yテーブル、巻出し機、包装機、充填機など、様々な機械に対応できます。
- 先進のシーケンサシステム、サーボアンプ、サーボモータ、サーボネットワークとの組み合わせで、生産性向上の最大化ソリューションを提供します。
高い基本性能とトータルパフォーマンスの向上
1CPU感覚の使いやすさで、マルチCPUのパフォーマンス
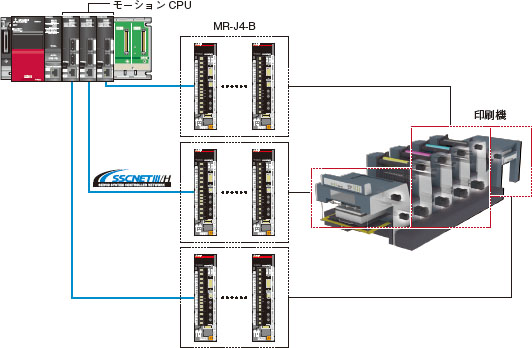
用途に応じてモーションCPU、シーケンサCPUを選択することで、フレキシブルなシステム構成を実現できます。
見やすく理解しやすいフローチャート形式のモーションSFCで、モーション制御のプログラミングを行うことができます。
さらにダイレクト位置決め始動命令により、シーケンスプログラムだけで位置決め制御、同期制御など、モーション制御のプログラミングができます。
モーションCPUのメモリ拡張
- カムデータ展開エリアを16Mバイトに拡張し、細かいカム分解能で多くのカムデータを制御することができます。
- デバイスメモリを128kワードに拡張し、多くのデバイスが必要な多軸システムに対応できます。
- カムデータ保存エリアを12Mバイトに拡張し、さらにSDメモリカードにも保存できます。
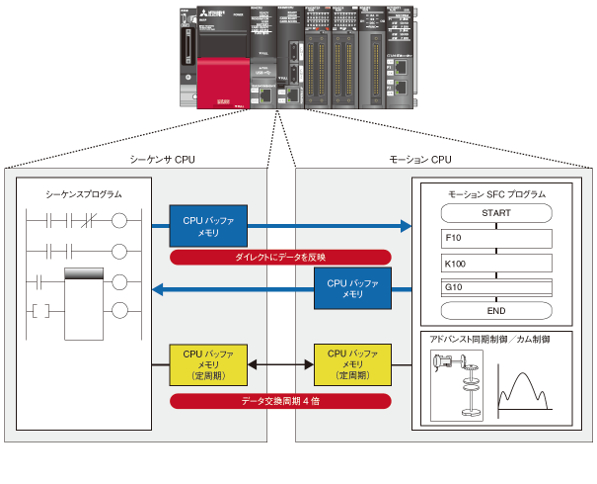
CPUバッファメモリによる1CPU感覚の使いやすさ
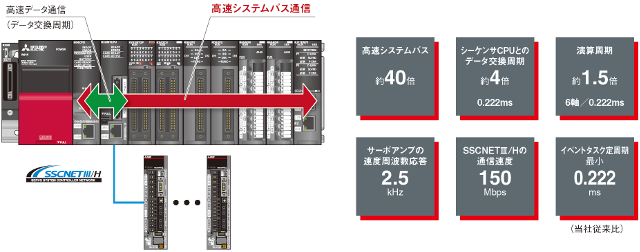
高速・大容量のCPUバッファメモリで、CPU間のデータ交換に革新をもたらしました。
シーケンサCPUとモーションCPU間にCPUバッファメモリがあり、2種類の用途に使用することができます。
- CPUバッファメモリは、2Mワード(モーションCPU)のデータを標準搭載しています。
CPU間での大量データの転送や即時反映したいデータの更新に役立ちます。 - CPUバッファメモリ(定周期通信エリア)は、シーケンサCPUとモーションCPU間を0.222msごとに24kワード(4CPUの合計)転送することができ、CPU間の同期性の高いデータを送受信するときに有効なメモリエリアです。
CPUバッファメモリ
モーションCPUは2Mワ-ド、シーケンサCPUは512kワードのCPUバッファメモリを標準搭載しています。
CPU間での大量データの転送や即時反映したいデータの更新に役立ちます。
512k ワードのバッファメモリエリアを使用することで、高分解能のカムデータなどの大きなデータを一度で転送することができます。
モーションCPU側で設定したデータをシーケンスプログラムのインターロックに、時間の遅れなく即座に使用することができます。
CPUバッファメモリ(定周期通信エリア)
シーケンサCPUとモーションCPU間を0.222msごとにデータを転送することができます。CPUバッファメモリ(定周期通信エリア)はモーション制御に同期しており、制御の無駄な時間を削減することができます。
モーションSFCによるプログラミング
モーションCPUでは、モーション制御のプログラムを「モーションSFC(Sequential Function Chart)機能」によりフローチャート形式で記述します。モーションCPUのプログラムをイベント処理に適したモーションSFCで記述することにより、機械の一連の動作をモーションCPUで一括制御し、イベント応答性を追求します。
見やすく理解しやすいフローチャート記述
- フローチャート表記により、機械の動作手順をそのまま記述するイメージでプログラミングできます。
- 工程制御のプログラムが簡単に作成でき、制御内容をビジブル化できます。
機械の一連の動作をモーションCPUで制御
- モーションSFCプログラムでサーボ制御、演算、I/O制御を一括して行うことができます。
- サーボ制御のためのシーケンスプログラムを作成しなくても、モーションSFCだけでサーボ制御を行えます。
高速同期ネットワーク SSCNETⅢ/H
- データ送受信を従来比3倍の双方向150Mbps(片方向300Mbps)へと高速化。
システムの応答性を飛躍的に向上します。 - 通信周期0.222msの高速シリアル通信により、装置のスムーズな制御を可能にします。
- 完全同期通信により、高精度な同期が必要な装置の高性能化を実現します。
- 1系統あたり最大3200m(局間最大100m×最大制御軸数32軸)の長距離配線が可能。
大規模システムにも対応できます。 - 同一系統にSSCNETⅢ/H対応サーボアンプとSSCNETⅢ対応サーボアンプを混在して使用できます。(混在時の通信速度:双方向50Mbps)
※SSCNET (Servo System Controller Network)

位置決め制御
PTP制御から位置追従、連続軌跡など、用途にあわせた様々な位置決め制御が可能です。
基本的な位置決め制御
- PTP、速度、速度・位置切換え、連続軌跡、位置追従、定位置停止速度、高速オシレートなど豊富な制御で様々な用途に対応できます。
- Mコード、目標位置変更、加減速時間変更、アドバンストS字加減速などの充実した補助機能を装備しています。
- モーションSFC、シーケンサCPUのダイレクト位置決め始動命令などから位置決め制御を始動することができます。
アドバンスト同期制御
ギア、シャフト、クラッチ、変速機、カムなどの機械機構をソフトウェアに置き換えた同期制御に加え、カム自動生成機能によりカム生成を簡単に実現できます。
- 軸ごとに同期制御の始動、停止ができます。
- 同期制御の軸と位置決め制御の軸の混在が可能です。
- 同期制御中の速度・トルク制御も可能です。
- R64MTCPUを3台使用することで、最大192軸のサーボモータを同期制御できます。
同期エンコーダ軸やサーボ入力軸で全軸を同期させます。
包装機、印刷機、サニタリ製造装置、タイヤ成形機
2軸が同期して移動する機構です。軸2を軸1に同期する設定にして同期制御を行います。他の軸は通常の位置決めをすることができます。
タンデム駆動
マルチCPU間アドバンスト同期制御
モーションコントローラR64MTCPUを3台使用することで、最大192軸のサーボモータを高精度に同期制御ができ、大規模システムに対応可能です。
同期制御パラメータ
- パラメータ設定だけで簡単に同期制御ができます。
- 入力軸には同期エンコーダ軸、指令生成軸、サーボ入力軸を設定することができます。
- 指令生成軸は制御軸にカウントされないため、出力軸を制御軸数分使用できます。
- カム軸は、カムNo.やカムデータにより、往復カム、送りカム、直線カム(回転テーブル、ボールねじ)の動作を実現することができます。
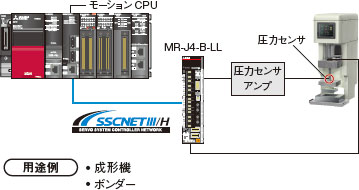
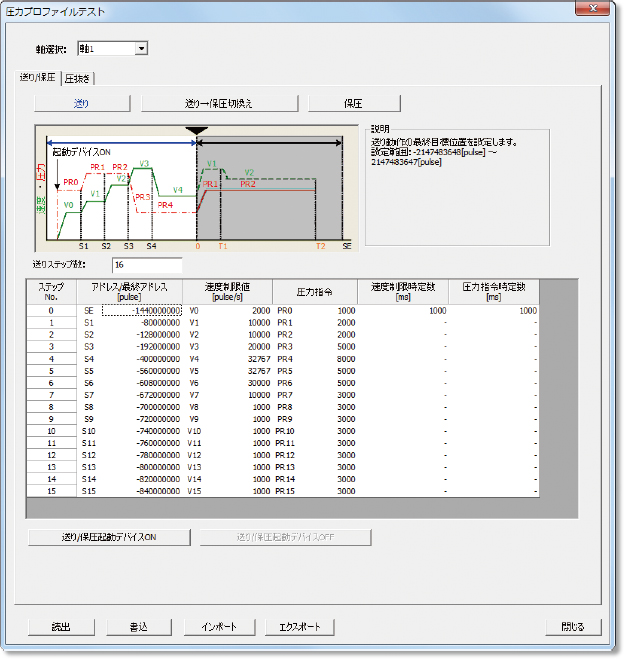
高度な圧力制御
圧力指令と圧力センサ値が一致するように制御し、負荷が変動しても実際の圧力を一定に保持できます。
送り、保圧、圧抜き工程を、圧力プロファイルとしてMELSOFT MT Works2による圧力制御のテスト運転ができ、段取り替えや調整が簡単にできます。

多軸調整機能
タンデム機構のように複数軸が同時に動作する機構を持つ装置において、サーボ調整を容易にし、装置の立ち上げ時間を短縮できます。
- 速度、加減速時間を指定して、複数軸を同時にJOG運転することが可能です。
- 複数軸同時に位置決め運転を行うことが可能です。
- チューニングでは複数軸を同一設定で同時に行うことが可能です。
サーボシステムレコーダ
サーボシステムレコーダ機能は、エラー発生時、全てのサーボアンプの情報をモーションコントローラにおいて自動で収集します。
トラブル発生時の指令値やフィードバック値の収集結果をもとに、トラブルシュートに役立てられます。
特長
- プログラムレスで位置、速度、トルクデータなどの情報を収集できます。
- 全軸のデータを収集するため、原因がエラー発生軸以外でも究明がしやすくなります。
- 連動レコーディング機能により、他のレコーディング対応機器で異常が発生した場合でも、データを収集します。
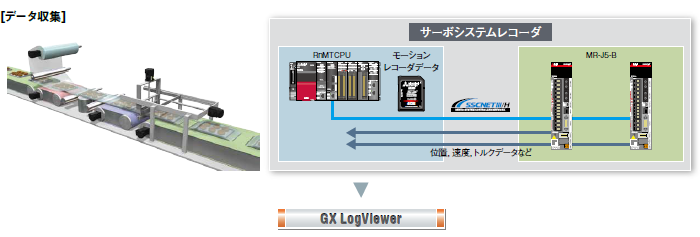
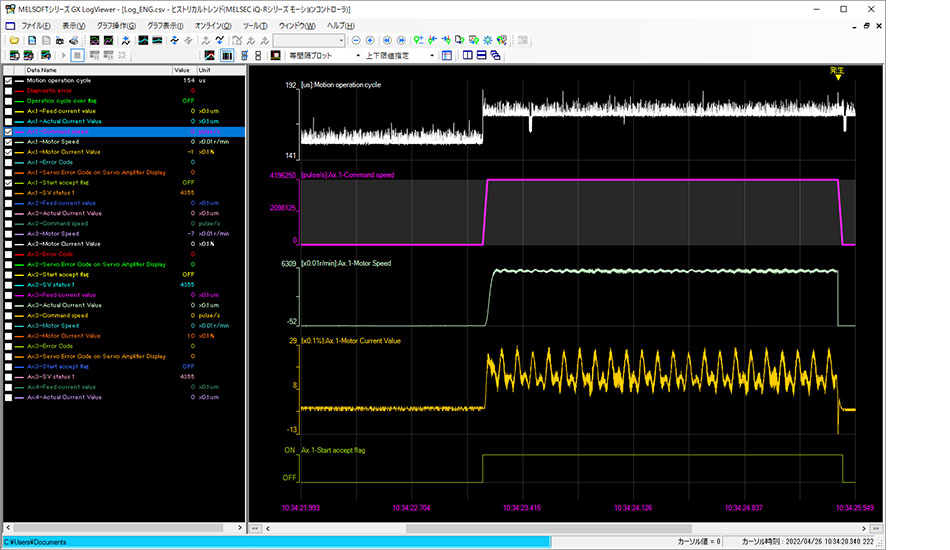
GX LogViewer
収集したデータはGX LogViewerで確認できます。
エラー発生時前後の運転状態を波形表示できるため、より詳細な解析ができ、原因究明、要因分析に役立ちます。
[特長]
- 収集したデータやイベントをグラフィカルに表示
- 自動調整機能やドラッグ操作により簡単にグラフ調整が可能
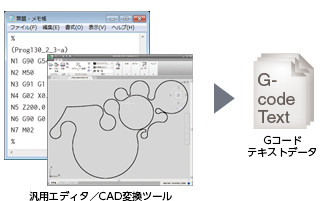
Gコード制御

Gコード制御アドオンライブラリ(有償)を追加インストールすることにより、Gコード制御に対応します。
簡易的な工作機械の切削加工やGコードによる描画など、多様な軌跡制御に適用できます。
- 最大16軸でのGコード制御が可能です。(同時補間軸数:最大4軸)
- Gコードプログラムはテキスト形式のため、汎用エディタで編集可能です。
- GOT2000を使用して、Gコードプログラム編集やモーションコントローラへの読出し/書込みが可能です。


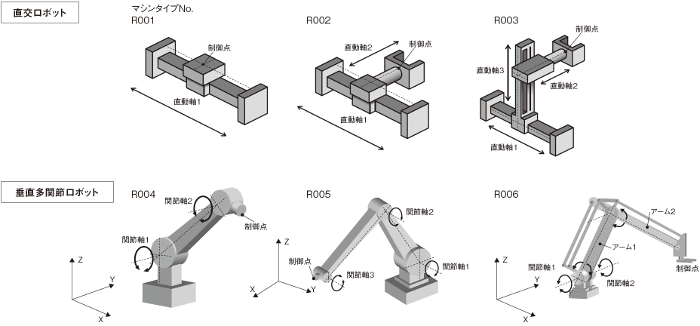
マシン制御機能
装置に合わせてマシンライブラリをインストールすることで、簡易ロボットに対応できます。
制御方式はXYZ直交座標空間を制御するマシン制御になります。
※マシンライブラリは三菱電機FAサイトよりダウンロードできます。
光分岐ユニット
サーボシステムネットワークSSCNETⅢ/H通信に接続し、3分岐を可能にする光分岐ユニットMR-MV200。
分岐することで、SSCNETⅢ/Hに接続できる機器をフレキシブルな配線で分散配置できます。
メンテナンス時、装置全体を停止することなく、装置稼働率を向上できます。
- モーションコントローラの切断/再接続機能により、必要なサーボアンプだけ部分電源OFFが可能です。
- 設定レスのため、配線変更だけで簡単に導入できます。
- 光分岐ユニットを中継することで、さらなる長距離配線が可能です。
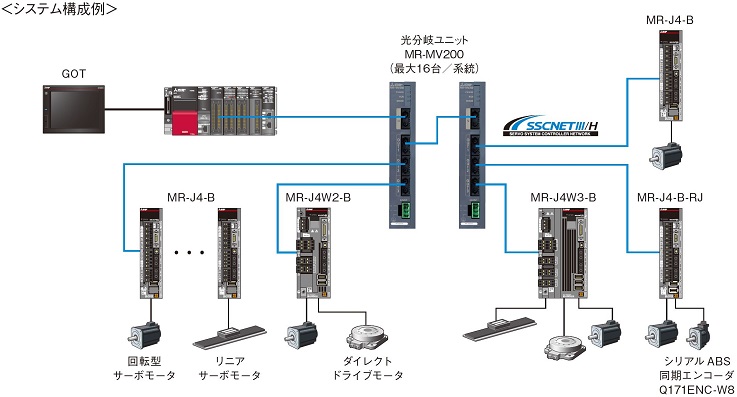
- ※光分岐ユニット使用時は、必ずシステム設定のSSCNET設定が「SSCNETⅢ/H」であることを確認してください。
機能一覧

| モーションコントローラ | ||||
|---|---|---|---|---|
| R64MTCPU | R32MTCPU | R16MTCPU | ||
| 最大制御軸数 | 64軸 (1系統最大32軸) | 32軸 (1系統最大16軸) | 16軸 | |
| 演算周期[ms] | 0.222~ | |||
| サーボアンプ接続方式 | SSCNETⅢ/H (150 Mbps) | |||
| 最大局間距離[m] | 100 | |||
| 接続サーボアンプ | MR-J5-B, MR-J5W-B 詳細はこちら MR-J4-B, MR-J4W-B 詳細はこちら |
|||
| 制御方式 | 位置制御,速度制御,速度・位置切換え制御,定寸送り,軌跡制御, 位置追従制御,定位置停止速度制御,高速オシレート制御, 速度・トルク制御 押当て制御 |
|||
| 位置決め制御 | 速度制御,直線補間 (最大4軸),円弧補間 (2軸),ヘリカル補間 (3軸),連続軌跡制御, 定位置停止速度制御,速度・位置切換え制御,高速オシレート制御,位置追従制御 |
|||
| 加減速処理 | 台形加減速,S字加減速, アドバンストS字加減速 |
|||
| プログラム言語 | モーションSFC,専用命令 | |||
| 位置決め点数 | 6400ポイント (間接指定可能) | |||
| 原点復帰機能 | 近点ドグ式 (2種類),カウント式 (3種類),データセット式 (3種類),ドグクレードル式, ストッパ停止式 (2種類),リミットスイッチ兼用式,スケール原点信号検出式, ドグレス原点信号基準式,ドライバ原点復帰式※1 |
|||
| 手動制御 | JOG運転,手動パルサ運転,同時始動 | |||
| 補助機能 | 緊急停止,ハードウェアストロークリミット,ソフトウェアストロークリミット, 絶対位置システム,アンプなし運転,無限長送り,任意データモニタ, マーク検出 イベント履歴,Mコード出力,安全監視※2, デジタルオシロ セキュリティキー サーボシステムレコーダ,指令生成軸,制振指令フィルタ |
|||
| エンジニアリング環境 | MELSOFT MT Works2 | |||
| DC5 V内部消費電流[A] | 1.20 | |||
| 質量[kg] | 0.28 | |||
速度・トルク制御
巻出し、巻取りなどの張力制御にも、シンプルモーションユニットを使用することができます。
速度・トルク制御中も現在位置管理を実施しているので、位置制御に戻した後も、絶対位置座標での位置決めが可能です。
速度・トルク制御(押当て制御)
位置決め動作中にモータを停止させずにトルク制御の押当てモードに切換えることができます。
位置制御以外の制御モードにおいても絶対位置管理をしているため、位置制御に切換えてもスムーズに位置決めができます。
アドバンストS字加減速
なめらかに加速度が変化する区間(Sin波形区間)と最大加速度を保持する区間(等加速度区間)の比率を調整する機能です。
なめらかさと高応答の両立を維持しつつ、加速時間を短縮できます。
マーク検出機能
高速で移動する包装紙のレジマークによるセンサ入力で、サーボモータの実現在位置を取得できます。レジマーク入力時のカッター軸の位置を補正することで、包装紙を一定の位置でカットすることができます。
デジタルオシロ機能
モーション演算周期に同期したデータ収集と波形表示により、動作確認、トラブルシュートを強力に支援します。
- ●目的別プローブ設定で、簡単に見たいデータを設定できます。
- ●ワード16CH、ビット16CHのデータをサンプリングでき、このうち、ワード8CH、ビット8CHのデータをリアルタイムに表示できます。
- ●装置にパソコンを接続しなくてもサンプリングが可能です。
- ●サンプリングデータをSD カードに保存し、パソコンでデータ解析が可能です。
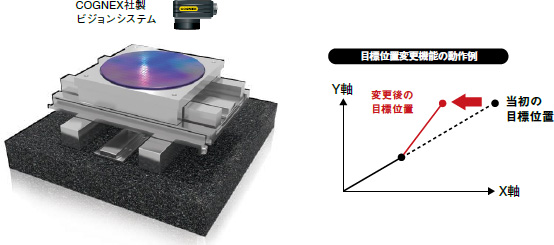
ビジョンシステム
モーションCPU内蔵のPERIPHERAL I/FによりCOGNEX社製ビジョンシステムとEthernet接続が可能です。
ビジョンシステムから取得したワーク位置を活用し、目標位置変更機能により高速なモーション制御を実現することで、アライメント時間を削減できます。
プロジェクトデータを保護するセキュリティキー認証
セキュリティキー認証機能により、セキュリティキーを登録していない パソコンではプログラムを開けません。
また、セキュリティキーを登録していないCPUではプログラムを実行で きないため、お客様の技術(ノウハウ)の流出を防ぎます。
シンプルモーションユニットは、セキュリティキーはシーケンサCPUの 拡張SRAMカセット、およびシーケンサCPU本体に登録できます。拡 張SRAMカセットを使用すると、CPU交換時にセキュリティキーの再 登録が不要になり、交換が簡単です。
モーションCPUはモーションCPU本体に登録されます。

- ※1:ドライバ(サーボアンプ)に設定された原点復帰方式を使用します。
- ※2:サーボアンプの安全監視機能を使用します。