モーションユニット 製品概要


コンセプト
マルチコアのプロセッサを搭載したモーションユニットはCC-Link IE TSNに対応することで、
より高速、より大規模なシステムを構築できます。
- ●一つのネットワークでサーボアンプ、入出力ユニットなどを接続して、サーボシステムを自在に制御できます。
- ●CC-Link IE TSN経由で、業界最高レベルの高性能サーボアンプMELSERVO-J5シリーズを接続できます。
- ●一貫したエンジニアリング環境でシステム設計からデバッグ、メンテナンスまで対応できます。
動作モードの選択
プログラム言語、プロジェクトの継承などを考慮して、2つの動作モードから選択できます。



- ●ポイントテーブル方式で簡単に位置決め制御が可能です。同期制御はパラメータを設定するだけで実行できます。
- ●CC-Link IE TSN経由でリモート機器を接続してシーケンサCPUからプログラミングできます。
- ●デジタルオシロを使用してモーション演算周期に同期したデータを収集し、波形表示で動作確認できます。
- ●既存プロジェクトを活用でき、設計工数の短縮ができます。
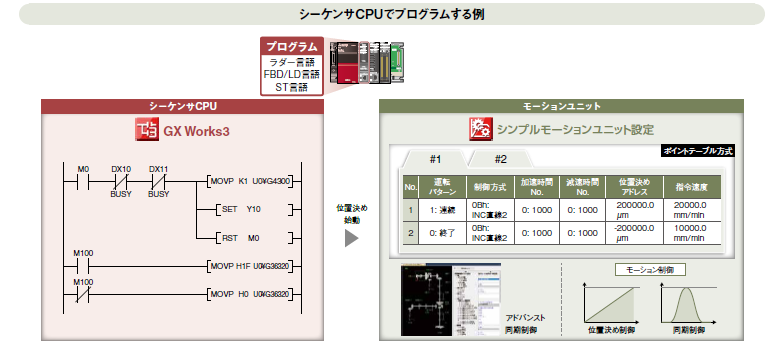

- ●モーションユニットはST言語、シーケンサCPUはラダー、FBD/LD、ST言語でプログラミングします。
- ●国際的な標準規格であるPLCopen® Motion Control FBのライブラリを使用してプログラムできます。
- ●ロギングしたデータからGX LogViewerで運転状態を解析でき、デバッグの効率アップになります。
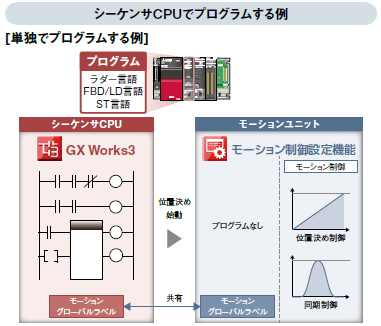
シーケンサCPUだけでプログラムできるため、設計者の負担軽減ができます。
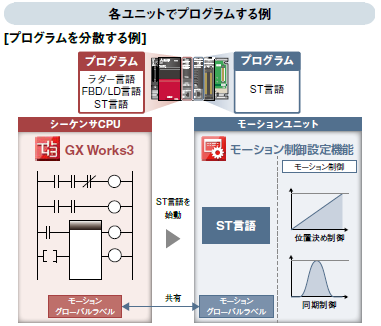
モーションユニットで演算処理、モーション制御を行うため、シーケンサCPUとの負荷分散が可能です。
生産現場とITシステムを融合するオープン統合ネットワークCC-Link IE TSN
CC-Link IE TSNは、サイクリック通信でリアルタイム性を保証した制御を実施しながら、ITシステムとの情報通信が混在可能なネットワークです。
多様な機器を用いたフレキシブルなシステム構築が可能で、優れたメンテナンス機能を備えているため、工場全体のIIoTインフラ構築に最適です。
- *TSN: Time Sensitive Networking
- *IIoT: Industrial Internet of Things


サーボアンプ MELSERVO-J5

サーボアンプMELSERVO-J5シリーズは独自の制御エンジンを更に進化させた業界最高レベルの高性能サーボアンプです。
CC-Link IE TSNと接続でき、高速・高精度なモーション制御が可能です。
多軸サーボアンプMR-J5W-GやドライブユニットMR-J5D-G4のご使用により、省スペース、省配線、低コストを実現できます。
*1.31.25 μsはMR-J5-G/MR-J5D1-G4の場合です。


