モーションコントローラ用本体OSソフトウェア
エンジニアリングをサポートする3つのパッケージ
 |
 |
 |
||||
|
|
|
||||
専用言語 直線補間(1~4軸)、円弧補間、等速制御、定寸送り、速度切換制御、速度制御、速度位置切換え |
メカサポート言語 同期制御、電子シャフト、電子クラッチ、電子カム、ドロー制御 |
EIA言語(Gコード) 直線補間(1~4軸)、円弧補間、ヘリカル補間、等速位置決め |
||||
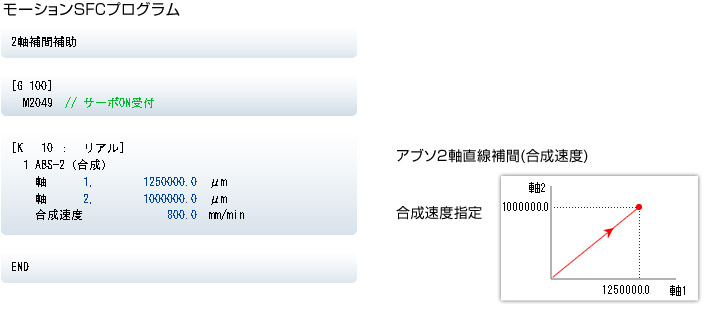
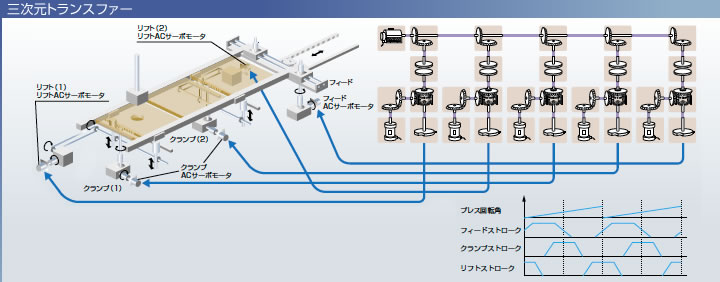
 1~4軸の直線補間、2軸円弧補間、等速制御、速度制御などの制御を行うことができ、搬送機、組立機などの用途に適しています。
1~4軸の直線補間、2軸円弧補間、等速制御、速度制御などの制御を行うことができ、搬送機、組立機などの用途に適しています。 複数のサーボモータの同期制御、およびソフトウェアによるカム制御を行うことができ、自動機などの用途に適しています。
複数のサーボモータの同期制御、およびソフトウェアによるカム制御を行うことができ、自動機などの用途に適しています。 1~4軸の直線補間、2軸円弧補間、等速制御などの制御をEIA言語(Gコード)で行うことができ、工作機周辺などの用途に適しています。
1~4軸の直線補間、2軸円弧補間、等速制御などの制御をEIA言語(Gコード)で行うことができ、工作機周辺などの用途に適しています。搬送組立に最適なソフトウェアパッケージです。
 |
 |
 |
||
 |
 |
 |
||
位置ループを含まないトルク制御を行うことができます。巻出し軸、巻取り軸などの張力制御用途にも使用できます。 |
[特許申請中]
|
サーボモータを指定速度で回転させ、定位置停止命令がONした後に指定位置に停止させることができます。運転中の速度変更だけでなく、加減速時間も任意の値へ変更できます。 用途例:スピナー |
プロジェクトと本体OSソフトウェア、MELSOFT MT Works2にソフトセキュリティキーを設定し、プロジェクトを操作するパソコンやモーションCPUを限定することで、ユーザデータを保護します。
|
システム設定にてデータ種別やモニタデータ格納デバイスを設定することで、実効負荷率、回生負荷率、母線電圧などのデータをモニタすることができます。 |
位置決め中に目標位置の変更を行ないます。ビジョンセンサなどからの位置補正を実行する場合、再度位置決め始動することなく、最終位置への位置決めが可能となります。 |
位置ループ、または速度ループによる、2種類の速度制御を行うことができます。 |
等速制御中の次のポイントへの位置決め開始を、通常の位置決め開始より高速に行うことができます。 |
入力ユニットからの信号をトリガとして、送り現在値、偏差カウンタ値など16種類のデータの中から、最大11データを同時に指定デバイスへ読み出すことができます。
|
位置決め制御における共通設定項目を、パラメータブロックとして最大64種類設定することができ、自由に選択できます。 |
運転中の実現在値やモータ電流、ワードデバイスデータなどに対応した、最大32点のON/OFF出力信号を、モーションSFCプログラムに関わらず高速に出力することができます。
|
1回の起動を行うことにより、位置決めポイントの設定値をリアルタイムに検出し、変化する設定値に追従して位置決め制御を行います。 |
任意比率のS字曲線により、加減速特性を設定できます。 |
加速度がなめらかに変化する加減速処理を行うことで、溜りパルスの変動を抑えて、整定時間の短縮が図れます。 |
位置決め、JOG運転中のトルク制限値変更をモーション専用命令CHGTで簡単に行うことができます
|
MELSOFT MT Works2のテストモードで、位置決めポイントをティーチングにて設定することができます。
|
位置決め運転中に、各位置決めポイントにて0~32767までのMコードを出力することができます。
|
位置決め、JOG運転中の速度変更、および途中停止/再始動をモーション専用命令CHGVで簡単に行うことができます。
|
原点アドレス等の原点復帰データの一部を、モーションCPUのワードデバイスで間接設定することができます。
|
0~5000msの範囲内で、自由にドウェルタイムを設定することができます。 |
ゲイン切換え指令をON/OFFすることで、モーションコントローラからサーボアンプのゲイン切換えを行うことができます。 |
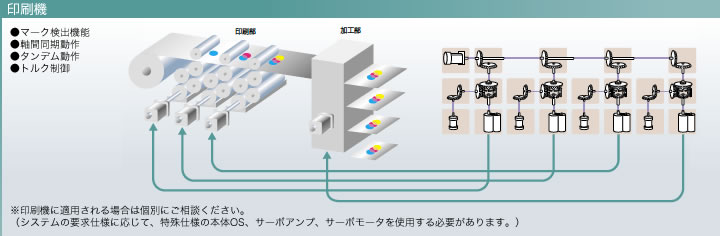
レジマークON時の位置を高精度に検出してラッチすることができます。包装機のレジマークの検出、各種センサーON時の位置データのラッチに使用できます。 |
||
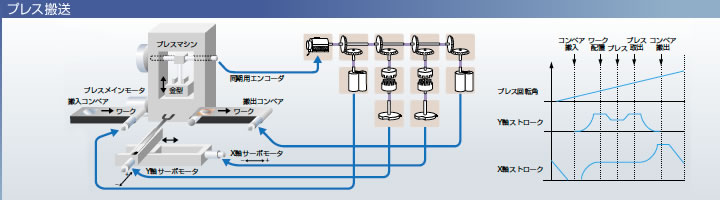
自動機に最適なソフトウェアパッケージです。
![]()
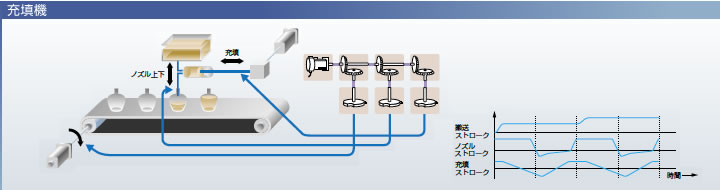
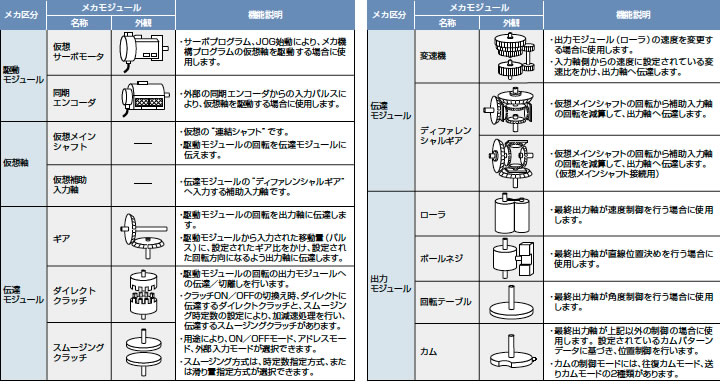
ギア、シャフト、変速機、カムなどの機械機構をソフトウェアに置き換えた同期制御です。軸ごとに同期制御の始動、停止ができます。また、同期制御の軸と位置決め制御の軸の混在が可能です。 |
加速度がなめらかに変化する加減速処理を行うことで、溜りパルスの変動を抑えて整定時間の短縮が図れます。 |
同期エンコーダに追従するサーボモータ軸端の位相遅れを補正することができます。また、2軸以上の同期制御時、各サーボモータ軸端の位相差を補正することもできます。
|
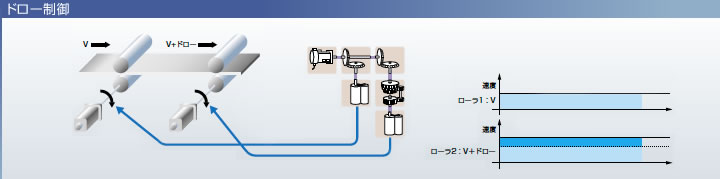
位置ループを含まないトルク制御を行うことができます。巻出し軸、巻取り軸などの張力制御用途にも使用できます。 |
[特許申請中] |
プロジェクトと本体OSソフトウェア、MELSOFT MT Works2にソフトセキュリティキーを設定し、プロジェクトを操作するパソコンやモーションCPUを限定することで、ユーザデータを保護します。
|
位置決め中に目標位置の変更を行ないます。ビジョンセンサなどからの位置補正を実行する場合、再度位置決め始動することなく、最終位置への位置決めが可能となります。 |
レジマークON時の位置を高精度に検出して、ラッチすることができます。包装機のレジマークの検出、各種センサーON時の位置データのラッチに使用できます。 |
|
![]()
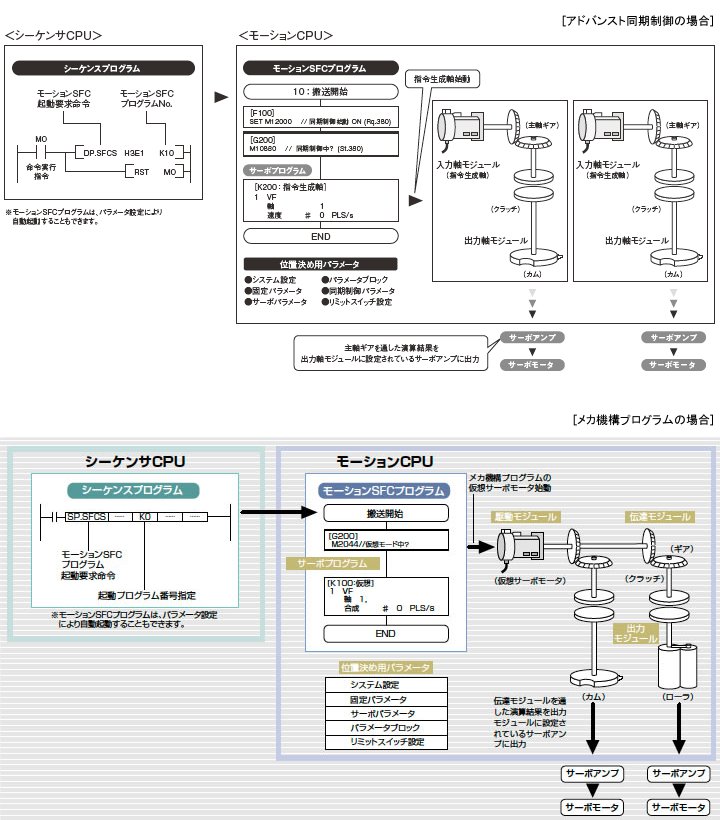
多彩なソフトウェアメカモジュール、カムパターンモジュールを自由に組み合わせることにより、複雑な同期制御、強調制御を簡単に、しかも低コストで実現できます。
同期制御には、アドバンスト同期制御とメカ機構プログラムを使用する2つの方式があり、どちらかを選択することができます。
(アドバンスト同期制御はQ17nDSCPUのみ対応)
![]()
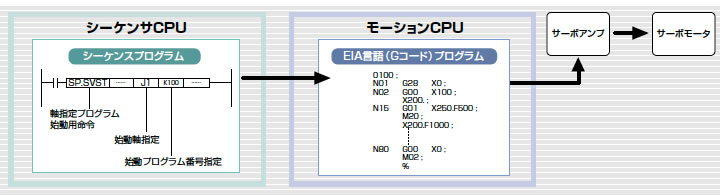
EIA言語(Gコード)により、多彩なモーション制御を可能にしました。 |
![]()
![]()
システム設定にてデータ種別やモニタデータ格納デバイスを設定することで、実効負荷率、回生負荷率、母線電圧などのデータをモニタすることができます。 |
運転中の実現在値やモータ電流、ワードデバイスデータなどに対応した、最大32点のON/OFF出力信号を高速に出力することができます。 |
入力ユニットからの信号をトリガとして、送り現在値、偏差カウンタ値など8種類のデータの中から、最大11データを同時に指定デバイスへ読み出すことができます。 |
位置決め制御における共通設定項目を、パラメータブロックとして最大64種類設定することができ、自由に選択できます。 |
位置決め運転中に、各位置決めポイントにて0~9999までのMコードを出力することができます。 |
0.001~65.535sの範囲内で、自由にドウェルタイムを設定することができます。 |
加減速方式を時間一定加減速、または加速度一定加減速から選択できます。 |
実行中のプログラムの処理を強制的に中断し、他のプログラムに切換えて処理を行うことができます。 |
移動命令を実行するために、軸を指定して始動する"軸指定プログラム"と、移動命令以外の制御文を実行するために軸を指定せずに始動する"制御プログラム"の2種類のモーションプログラムを実行することができます。 |
原点アドレス等の原点復帰データの一部を、モーションCPUのワードデバイスで間接設定することができます。 |
ゲイン切換え指令をON/OFFすることで、モーションコントローラからサーボアンプのゲイン切換えを行うことができます。 |
任意比率のS字曲線により、加減速特性を設定できます。 |