ACサーボ MELSERVO 製品特長

現場の課題はこれで解決!

≪機器構成≫
シーケンサCPU:R04CPU
基本ベース:R35B
電源ユニット:R63P
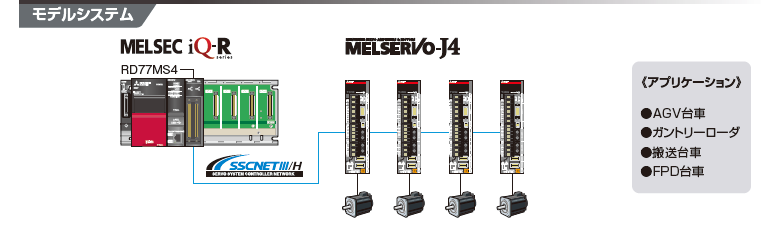
シンプルモーションユニット:RD77MS4
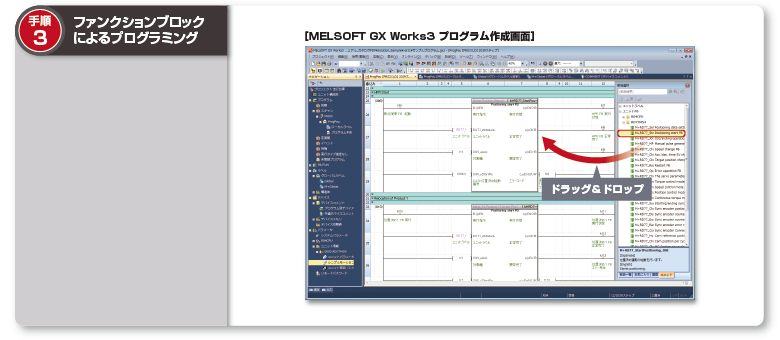
エンジニアリング環境:MELSOFT GX Works3
サーボアンプ:MR-J4-B-KJ
サーボモータ:HG-SR, HG-KR

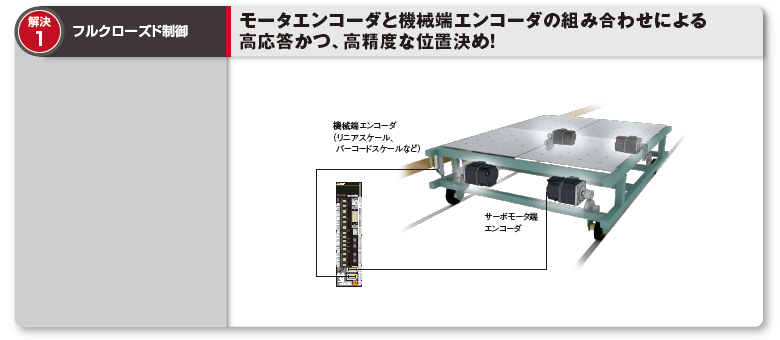
運転中はサーボモータ端、停止時は機械端に切り換えて位置制御するため、ゲインを高く設定することができます。
整定時間の短縮化とともに駆動部のスリップの影響をなくすことができ、高精度な位置決め制御が可能です。
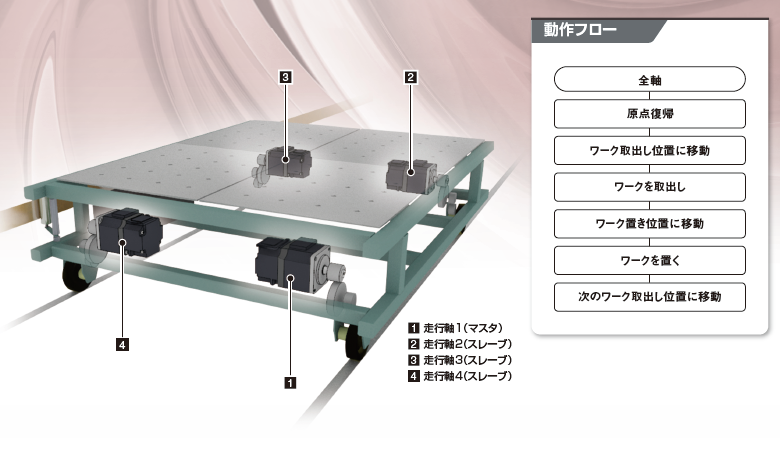
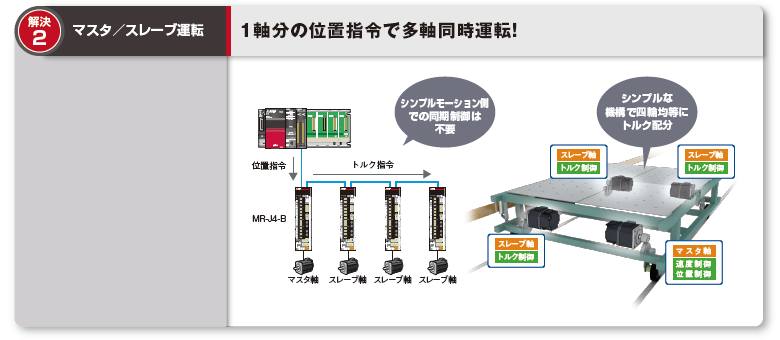
MR-J4-Bは、ドライバ間通信によりマスタ軸からスレーブ軸に同じトルクデータを送信可能なため、シンプルモーションの同期制御を使用せずに多軸同時運転ができます。
シンプルにシステムを構築でき、立ち上げ時間の短縮が可能です。
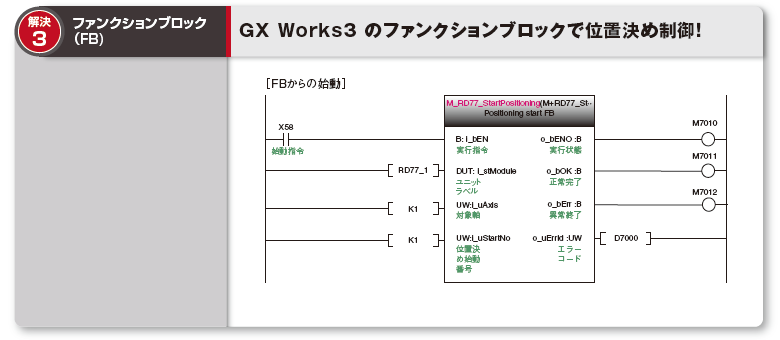
MELSOFT GX Works3のユニットFBにより、シーケンサCPUから位置決め制御やアドバンスト同期制御などのモーション制御を実行し、簡単にプログラミングできます。
機械の立ち上げを速やかに実現できます。

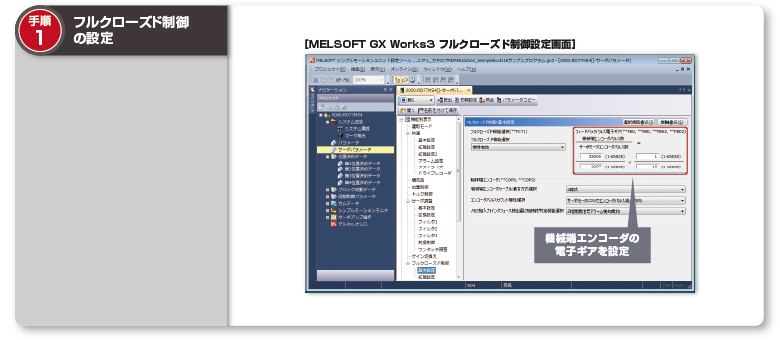
軸1のサーボパラメータにフルクローズド制御の電子ギアを設定します。
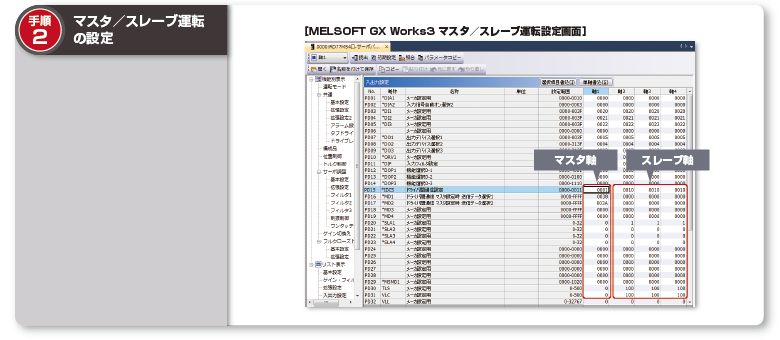
マスタ軸、スレーブ軸に対応したサーボパラメータを設定します。
当社が提供するユニットFBや登録FBから、必要なFBをエディタ画面にドラッグ&ドロップするだけで、簡単にプログラムが作成できます。
サーボシステムの特長
DC電源 * 入力仕様のサーボアンプMR-J4-B-KJに、バッテリ駆動などで直接DC電源を供給することにより、給電ケーブルでの引き廻しが不要となります。
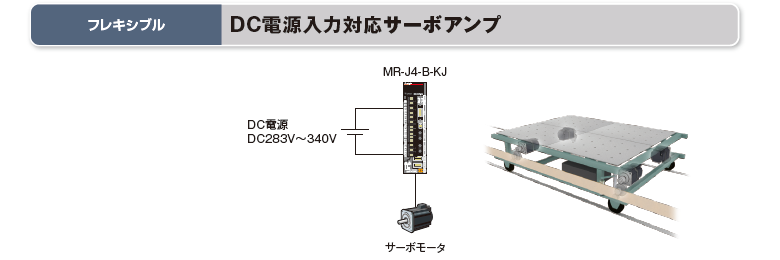
* サーボアンプの定格名板に記載されているAC入力電源電圧を整流したものを、制御回路電源入力と主回路電源入力に使用できます。
√2×AC200V~√2×AC240V(DC283V~DC340V)
DC電源入力仕様のサーボアンプについては、営業窓口にお問い合わせください。
モータ極数とスロットの組合せの最適化により、トルクリップルを大幅に低減。トルクリップルの影響を受け易い低速運転においても滑らかに駆動し、安定性が向上します。
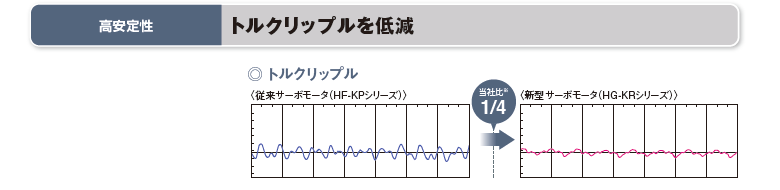
* 400Wの場合です。
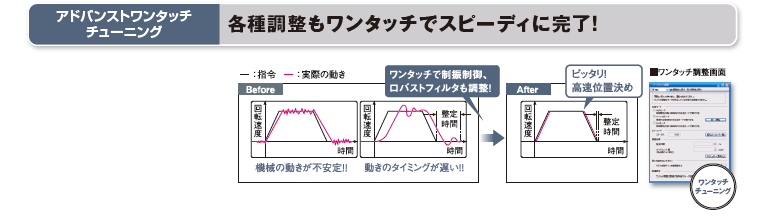
ワンタッチチューニング機能をオンするだけで、機械共振抑制フィルタ、アドバンスト制振制御Ⅱ、ロバストフィルタを含めたサーボゲイン調整が完了。リアルタイムオートチューニングでは必要だった応答性の設定も、自動で実施します。