ACサーボ MELSERVO 製品特長

現場の課題はこれで解決!

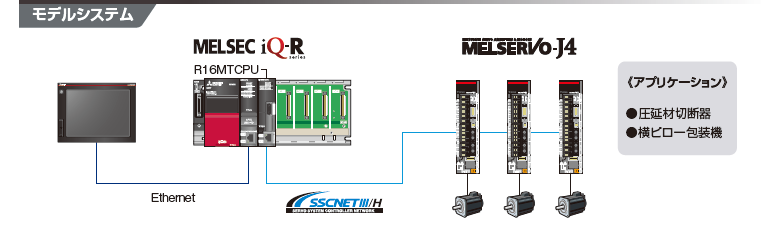
≪機器構成≫
シーケンサCPU:R04CPU
基本ベース:R35B
電源ユニット:R61P
モーションCPU:R16MTCPU
GOT:GOT2000シリーズ
エンジニアリング環境:MELSOFT GX Works3, MELSOFT MT Works2
サーボアンプ:MR-J4-B
サーボモータ:HG-KR

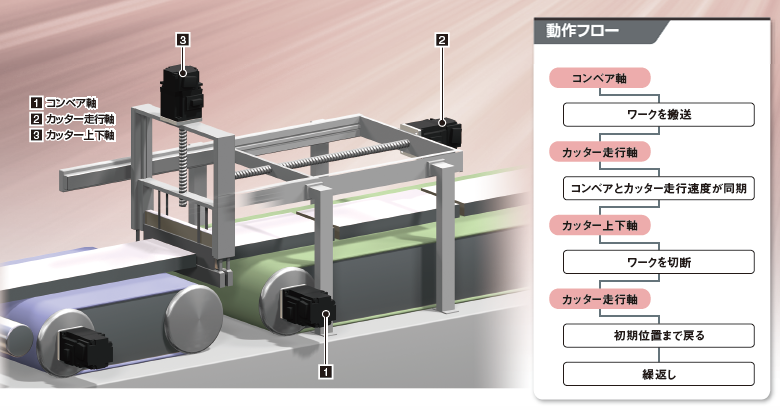
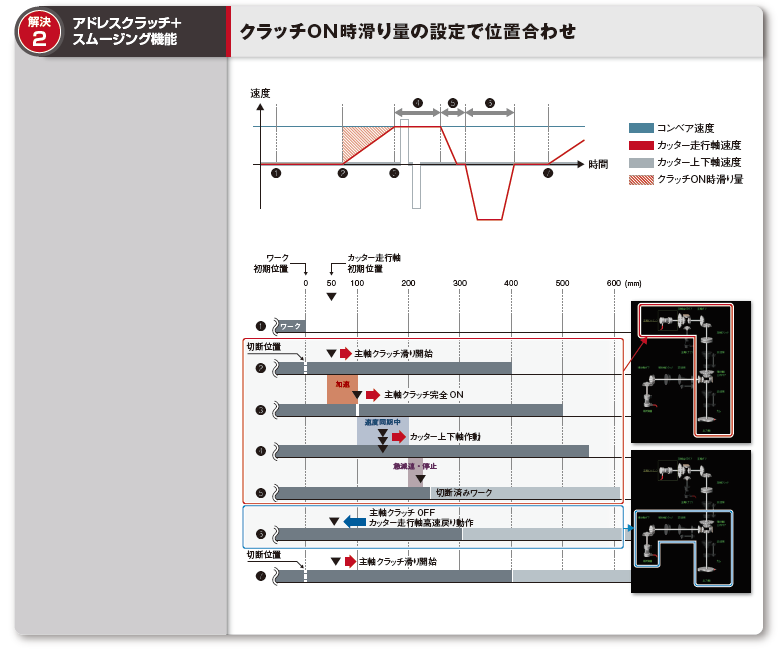
カッター走行軸は、コンベア軸に同期して駆動します。アドバンスト同期制御の設定では、主軸(メイン)をコンベア軸の送り現在値に設定し、クラッチ、合成ギアを介してカムに接続します。
補助軸に指令生成軸(指令生成のみを行う軸)を設定し、主軸クラッチOFF時に駆動させて、カッターの戻し動作を行います。
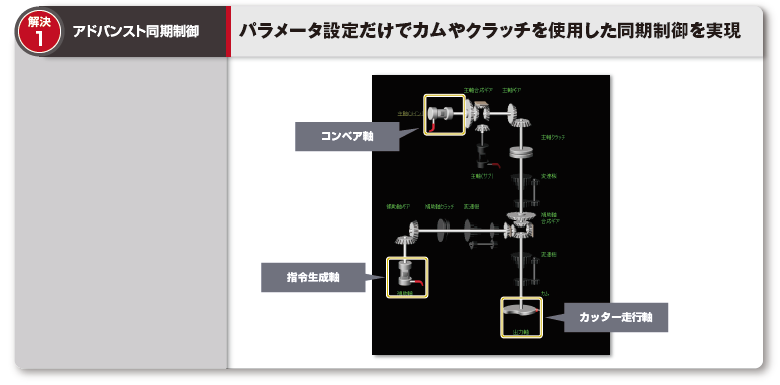
[クラッチON時滑り量]=[ワーク初期位置]-[カッター初期位置]の距離と設定することで、カッターの速度がコンベアの速度と一致する場所と切断位置が同一になります。
コンベア軸とカッター走行軸の速度が同期している間に切断を行い、切断完了後にクラッチを切って走行軸を停止させます。
補助軸の指令生成軸を駆動させ、走行軸を初期位置まで戻します。
2回目以降は、クラッチをONするアドレスをプログラムで計算し、設定した切断長でワークを切断する動作を繰り返します。

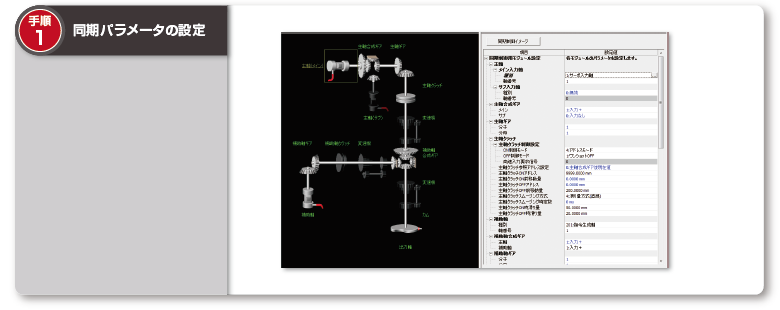
カッター走行軸の同期パラメータを以下のように設定します。
主軸(メイン) :コンベアの駆動軸
主軸クラッチ:手順2にて設定
補助軸 :指令生成軸
カム :直線カム(0番)
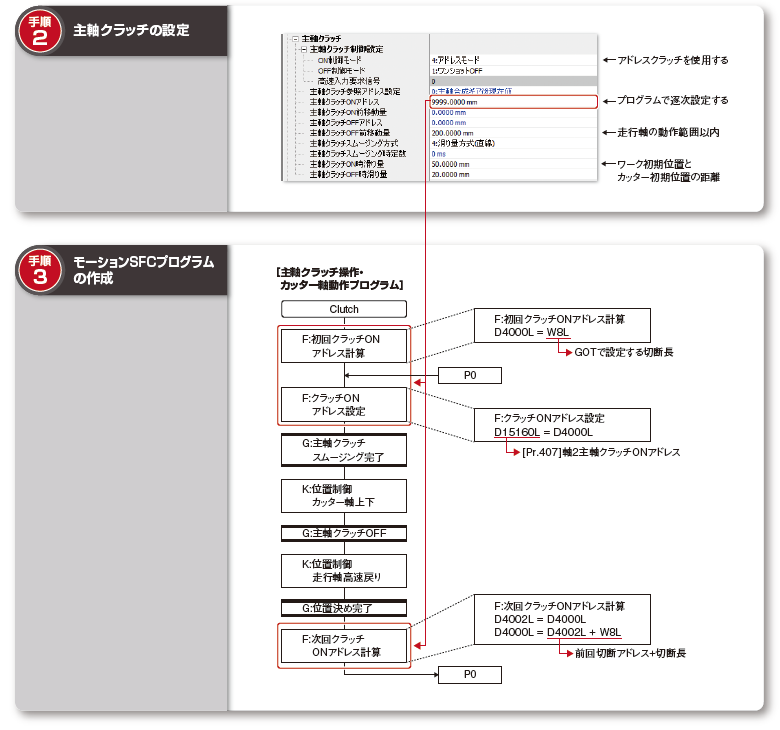
主軸クラッチのON制御モードを“アドレスモード”に設定します。
クラッチがONするアドレスは、プログラム上で設定します。
コンベア送り、クラッチ操作などのモーションSFCプログラム、サーボプログラムを設定します。
サーボシステムの特長
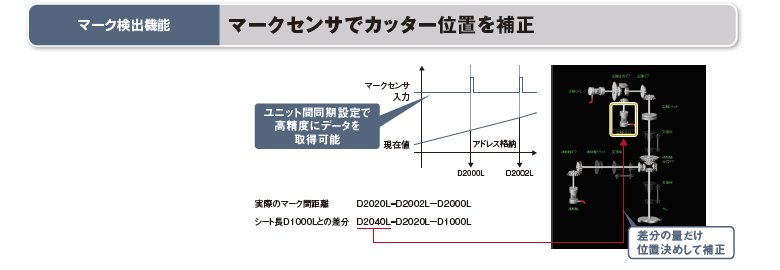
同期エンコーダやマーク検出機能を使用した走行切断装置にも簡単に変更できます。
コンベア送りをインバータで駆動している場合は、同期エンコーダを取り付けて、入力軸に設定します。
* 同期エンコーダを使用する場合は、高速カウンタユニットが必要です。
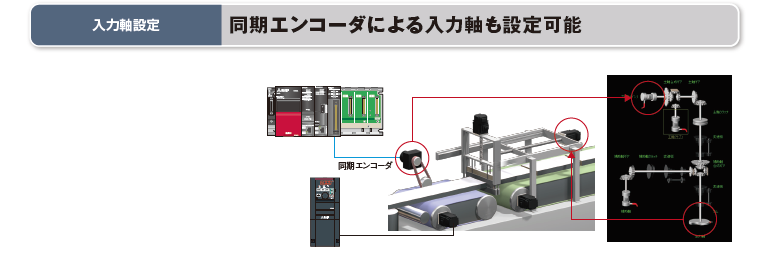
レジマーク付きのワークの場合、レジマーク検出信号をトリガとして、クラッチをONすることができます。
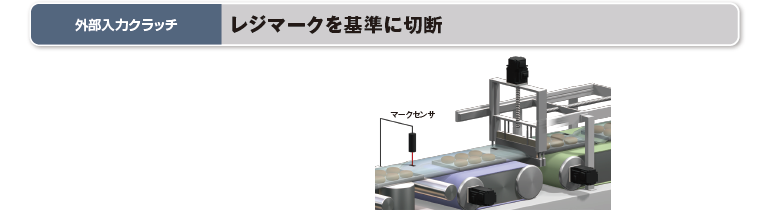
アドレスクラッチと外部マークセンサを併用することで、シートの伸縮による切断長の変化を補正することができます。