情熱ボイス


プログラミングツールとともに必要となるのが、ロボットのティーチングだ。 これまではティーチングペンダントと呼ばれるロボットにつながった端末の ボタン操作 によるもの、あるいはロボットの アームを直接手で動かして 覚えさせるダイレクトティーチングがある。
しかし、ボタン操作は難しかったり、アームを直接動かすことでは複雑な操作ができなかったりと、いくつかの課題があった。
プログラミングツールとともに必要となるのが、ロボットのティーチングだ。 これまではティーチングペンダントと呼ばれるロボットにつながった端末の ボタン操作 によるもの、あるいはロボットの アームを直接手で動かして 覚えさせるダイレクトティーチングがある。
しかし、ボタン操作は難しかったり、アームを直接動かすことでは複雑な操作ができなかったりと、いくつかの課題があった。
そこで、協働ロボットでは両者の機能を併せ持つ機器を付け加えることにした。ロボットのアームとハンドの間に挟み込んで使う着脱式の機器である。これによりボタン操作とその機器を手で握って動かす動作で、ロボットにティーチングできるようにする。社内では「ガジェット」と呼ばれ、RT VisualBoxと並行して開発が進んでいた。
2017年11月、国際ロボット展で協働ロボットのプロトタイプが初めて公開された。なかでも大きな反響が寄せられたのは、ロボットのプログラミングイメージを一新したRT VisualBoxだった。ロボット活用経験のないユーザーが「これだったら自分たちでもロボットを使えるかもね」と期待を寄せていくだけでなく、「プログラミングは今後全部これで行いたい」とまで言い切る熟練技術者もいた。
一方でガジェットに対しては、あまり芳しい反応は返ってこない。メンバーにとって大きな「盲点」があったのだ。

現在のMELFA ASSITA(左)と2017年当時のプロトタイプ(ガジェット付き)(右)。
2017年11月、国際ロボット展で協働ロボットのプロトタイプが初めて公開された。なかでも大きな反響が寄せられたのは、ロボットのプログラミングイメージを一新したRT VisualBoxだった。ロボット活用経験のないユーザーが「これだったら自分たちでもロボットを使えるかもね」と期待を寄せていくだけでなく、「プログラミングは今後全部これで行いたい」とまで言い切る熟練技術者もいた。
一方でガジェットに対しては、あまり芳しい反応は返ってこない。メンバーにとって大きな「盲点」があったのだ。
「 確かに そうだよなあ・・・」
原口は、2017年11月の国際ロボット展に展示した協働ロボットのプロトタイプを動かしながら、ガジェットに対する来場者の反応の意味を考えていた。
「可動範囲が 狭くなる 」
「上にいくと画面が見 えない 」
「 動かすたびに ついていくのが煩わしい」
アームとハンドの間に挟むボックス状のガジェットは、ダイレクトティーチングしながら画面操作で細かい動作を指定できる。しかし折り畳んだアームがガジェットと干渉することで自由に動かせなかったり、アームが上に伸びるとガジェットの画面が見えなくなったりする不便さを、展示会で相次いで指摘されたのだ。ガジェットの使用に条件をつければいいのではないか。開発者の間ではそのような対応も検討されたが、利便性を高めるはずのガジェット搭載の意味が損なわれるため、根本的な解決とは言いがたい。決定打が見つからないうちに時間は刻々と過ぎていく。

「ガジェットの開発を 打ち切ろう 」
開発リーダーの寺田はガジェット開発の打ち切りを決断した。苦渋の決断ではあったが、展示会で指摘されたことを見過ごすわけにはいかない。そして、2018年10月に協働ロボットの仕様が確定した。ガジェットはその仕様に含まれることなく、ひっそりと姿を消した。
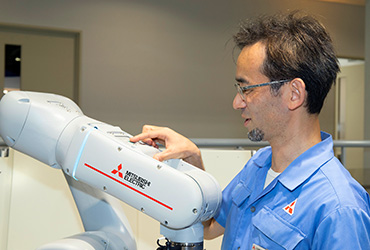

現在のMELFA ASSISTA「ダイレクトティーチング」では、アーム上部にある操作ボタンで簡単に動作指示ができる。
コスト追求の影響 をどう補うか
協働ロボットのエンジニアリングサンプルが完成したのは2019年6月。販売代理店や一部ユーザーに試用してもらい、客観的な評価を受ける作業が始まったが、試用する関係者の声は一点に集中した。ダイレクトティーチングでロボットアームを手で動かす時に、重たく感じるというのだ。
重さを感じる原因は明らかだった。エンジニアリングサンプルとして開発した協働ロボットは、他の多くのロボットが関節部に採用しているトルクセンサを使っていない。トルクセンサがあれば、重さの原因である摩擦の影響をうけることなく補助に必要な力を正確に計算できるが、コスト追求のためにその搭載は見送ったのだ。代わりにモータの電流値から負荷を計算することにした。ところが機器の個体差などの影響からか正確な値が導き出せない。
「 なぜ 合わないんだ・・・」
原口は机上で計算した理論値と、目の前のロボットの実測値が合わない事実に悩まされ続けた。トルクセンサが無くとも、人が操作していることを検知できるセンサ(もしくはスイッチ)があれば, 摩擦の影響は押さえられる。もともとガジェットを付けたことも人が動かそうとしている方向を検出するためだった。しかしガジェットは既に仕様から消えている。何としても今のやり方で解決しなくてはならない。
人の感覚は、 人に聞かなくては分からない
営業部ロボット課の菅原陸は「このまま市場に出せば、ユーザーからも必ず同じ指摘をされる」と危機感を持った。営業サイドから何か重さの問題解決に力になれることはないだろうか。
具体的な目標値を定義することも考えたが、 重さはもともと 人の感覚 によるところが大きく、重さを感じるポイントも 人それぞれ だ。 そして動き始めか動いている途中なのか、感じ方は人によって異なる。数字で定義できないなら徹底的に人の感覚に頼るしかない。菅原は名古屋製作所に支社や代理店の担当者が訪れるたびに、試作中の協働ロボットを手で動かしてもらい、重さの印象をヒアリングした。社内でも、手が空いているスタッフを見つけては試作機のもとへ引っ張り、動かしてもらって感想を聞く。それを開発にフィードバックし、改良したロボットを再び同じ人に動かしてもらう。
菅原は社内社外問わず、とにかく多くの人の感想を聞くことに専念した。社内外を巻き込んだ人海戦術は、愚直なやり方ともいえるが、数字では表せない使い勝手を検証するうえで効果的だった。

正式発売に向けて 大詰めを迎えた各現場
佐藤は、協働ロボットのパーツを担うパートナーづくりに注力していた。 なかでも ロボットの用途を広げるうえで ハンドを開発するパートナーの拡充は重要だ。
ハンドはロボット本体と制御連携するため、技術的に高度な情報交換が必要になる。協働ロボットで実績のある欧州のベンダへ働きかけなければならないと奔走した。
並行してカタログなど販売ツールの準備も始まった。「協働ロボットは産業用ロボットの延長ではない」という方針会議での共通認識を踏まえ、菅原は産業用ロボットで従来行ってきたカタログの作り方を全て取っ払うことにした。

初めてロボット導入を検討するユーザーにもメッセージが届くよう、 詳細説明を大幅にカットして誰もが手に取りやすく、共感し、イメージしやすいソフトなつくりに軸足をおいた。
発売を半年後に控えた2019年10月。それまで社内では「人協働」というコードネームで呼ばれていた協働ロボットの名称は、
「MELFA ASSISTA」 に決まった。
「助ける」という意味のASSISTに、
誰でも(Anyone)・どこでも(Anywhere)・
いつでも(Anytime)の頭文字のAを付けたものだ。
もっとも開発の現場は「量産体制を整えるための各評価作業に追われていた」(原口)という。正式発売に向けた最終評価作業の大詰めで追い込まれていたが、全評価作業が2020年3月に完了し、発売に向けた準備はすべて整った。
「 自ら売りに 回りたい」
2020年5月。MELFA ASSISTAは正式に発売された。コロナ禍で製造業に限らずあらゆる業界が影響を受ける逆風の中での発売だったが、上々な出だしを見せている。
使い勝手を訴求する各機能 が、これまでロボットに関心があっても、導入を見送ってきた中小製造業を引きつける要因となった。 これまでにない内容の開発にチャレンジした設計メンバーにとっては大きなやりがいに繋がった。5月の発売時点では19社だったハンドをはじめとするパートナーも、好スタートの気配を感じ取ったのか関心が広がり、発売から7カ月後には早くも24社にまで拡大している。
「開発者として自らお客様の声を聞いて、
自分たちが作った製品の評価を直接感じ取りたい」
そう語る開発チームを率いた寺田の言葉は、あらゆる知見と熱意をもって、MELFA ASSISTAを誕生させた開発者の誇りに満ちていた。
“ユーザーに新しい価値と感動を届けたい”
という開発チームの熱い想いは、これからも無限の可能性を秘めた新たな製品を生み出し続けていくのだろう。
- 要旨 アナログな要件との戦いから生まれた「安全で使いやすいロボット」
- 第1回 協働ロボットは産業用ロボットの延長ではない
- 第2回 “規格”の迷路に入り込む
- 第3回 発売直前まで続いた「使いやすさ」の追求
アンケート
ご回答いただきありがとうございました