特集論文

MELSEC iQ-Rシリーズ サーボシステムコントローラ
2015年11月公開【全3回】
名古屋製作所 大野宏幸 安藤友典 末松圭司
第2回 ソフトウェア
3. ソフトウェア
3. 1 ユニット間の連携強化
バスアーキテクチャの刷新に伴い、各ユニット間の制御上の連携を強化した。CPUユニット間の連携では、例えば従来機種では、位置決め用プログラムをモーションCPUユニットにあらかじめ書き込んでおく必要があり、プログラミングが煩雑・柔軟性に欠けるという問題があったが、システムバスの速度向上によって、シーケンサCPUユニットからダイレクトに位置決めデータの指令が可能となった。これによって位置決め制御をシーケンサCPUユニットから直接コントロールでき、制御の柔軟さが向上するとともにファンクションブロック(FB)活用によるプログラミング容易化を実現した。
また、装置の高速・高精度化には、サーボ制御とI/O制御、さらにはシーケンスプログラムの実行タイミングの同期が欠かせない。QシリーズではCPUユニット間に限定していた同期クロックの伝達を、システム全体に分配する仕組みを新たに取り入れ、タイミング管理したより高度な制御を行うことが可能となった。
3. 2 アドバンスト同期制御
当社のサーボシステムコントローラでは、ギヤやクラッチ、カムなどの機械機構を電子制御で簡単に実現できる “アドバンスト同期制御” を全シリーズ共通で展開している(図2)。MELSEC iQ-Rシリーズでは、CPUの性能向上を活用し、従来はオフラインで(エンジニアリングソフトウェア上で)しか作成できなかった複雑なカムパターンをCPUユニット上で動的に作成できるようにし、表示器などのHMI(Human Machine Interface)を用いたカムパターンの微調整が可能となった。また、SDメモリカード上のCSV(Comma Separated Value)ファイルを介してカムパターンを読書きできるようにしたため、より多彩な生産レシピを一度に格納して使用可能となった。
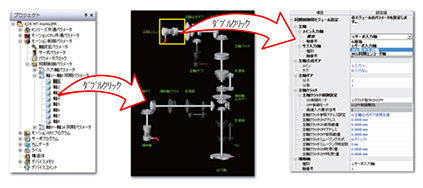
図2.アドバンスト同期制御
3. 3 アドオン機能
これまで、特定用途に特化したモーション制御が必要な場合、特殊ソフトウェアで対応していたが、今回、使用頻度の高い特殊機能をモジュール化し、アドオン機能としてユーザーに提供する仕組みを構築した。装置に応じたアドオン機能を組み合わせることによって、様々な制御ソリューション(アプリケーションパッケージ)の提供が可能となった(表1)。
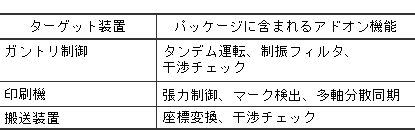
表1.アドオン機能
3. 4 RAS(信頼性・可用性・保守性)向上
システムで発生したイベントやサーボに関連するデータのログ機能を強化することで、従来シリーズと比べRASの大幅向上を実現した。例えば、各ユニットで発生したエラーやユニットへの操作履歴をイベント履歴として1つのログに統合することで、トラブルシューティングが容易となった。サーボシステムコントローラのイベント履歴として、MELSEC iQ-Rシリーズ共通のイベント(制御データの変更や電源状態変化、セキュリティ関連情報など)に加え、サーボネットワークSSCNETⅢ/Hの通信状態、原点復帰要求発生理由なども記録することによって、トラブル発生時の原因究明に役立つようにした。
また、SDメモリカード上のCSVファイルで、データのサンプリング設定やサンプリング結果の蓄積が可能で、エンジニアリングソフトウェアのない生産現場でも、トラブル発生時の波形採取が可能となった。さらに、SDメモリカードを使用したCPUユニット上の制御データのバックアップ・リストアや、プログラムの更新を可能とし、CPUユニット交換時のダウンタイム短縮に貢献する。
また、信頼性の面ではユニット内部の各種メモリへのECC(Error-Correcting Code)の採用や、フラッシュメモリの書換え回数管理、使用セクタ分散化を行うことでメモリ素子のソフトエラーやサイクル寿命への耐性を強化した。