特集論文

MELSEC iQ-Rシリーズ サーボシステムコントローラ
2015年11月公開【全3回】
名古屋製作所 大野宏幸 安藤友典 末松圭司
第3回 エンジニアリングソフトウェア
4. エンジニアリングソフトウェア
4.1 エンジニアリングソフトウェア間の連携強化
シーケンサ、シンプルモーションユニット、サーボアンプの各エンジニアリングソフトウェア間の連携を強化した。
これまでは各機器専用のエンジニアリングソフトウェアをそれぞれで使用していたため、プログラミング、パラメータ設定、デバッグ、サーボ調整の各作業が繁雑で使い難かったが、連携を強化することによって各ソフトウェア間がシームレスに動作できるようになり、これらの作業がGX Works3だけで行えるようになった。
4. 2 シミュレータ連携
GX Works3に共有メモリによってシーケンサシミュレータと連携したシンプルモーションシミュレータを開発した。過去に通信用ライブラリ “EasySocket” によるシミュレーション間連携を開発したがユニット間の通信に時間がかかるうえ、全ての機能が実機通りにはシミュレートできていなかったため、ユーザープログラムのデバッグでも未対応機能の部分はデバッグできていない状況であった。そこで今回EasySocket通信を共有メモリ間通信に変更することによって高速化し、連携動作の制約を解消した。また、シンプルモーションユニット部のシミュレータではサーボアンプ及びサーボモータも仮想上の動作となるため、実機がない状態でも駆動制御シミュレーションが可能となった。これによってシーケンサから駆動制御までの実機に近いシミュレーションが可能となるため、ユーザーによるデバッグ精度が向上し、現地での立ち上げ工数削減に貢献する(図3)。
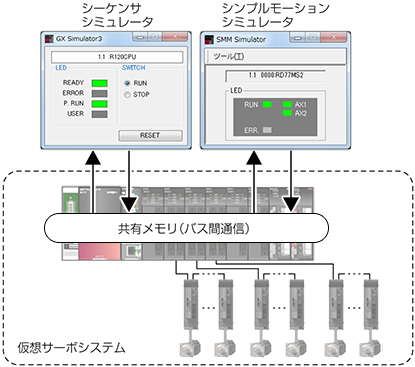
図3.シミュレータ連携
4. 3 デジタルオシロスコープ機能の強化
モーションCPUユニットではパソコン不要のオフラインサンプリング機能及び二次元の軌跡表示に対応した(図4)。
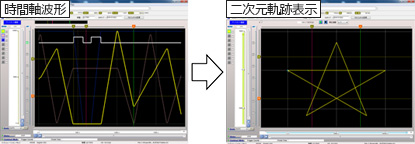
図4.二次元の軌跡表示
オフラインサンプリング機能では、これまでモーションCPU用ソフトウェアMT Works2のデジタルオシロスコープはモーションCPUユニットと接続した状態でなければサンプリングを継続することができなかったため、長時間のサンプリングが必要な場合はパソコンを接続状態で設置しておく必要があった。そこでモーションCPUユニットでは、あらかじめデジタルオシロスコープでサンプリング項目、条件などをCPUユニットに転送し、サンプリング開始後は通信ケーブルを外してもサンプリングを継続できるようになったため、サンプリングが完了した時点で再度パソコンを接続してサンプリングデータの読み出しが可能となった。
このほかにもモーションCPUユニットはサンプリングしたデータをSDメモリカードへ保存することができるため、SDメモリカードによる読み出しも可能となった。
また、今までの波形表示は時間軸を基準にした波形であったが、X-Y軸の二次元軌跡表示も実現した。この機能は加工機などの装置で加工作業の事前確認ができるため加工の失敗を減らすことができ、さらにリアルタイム表示にも対応しているためデバッグや調整作業を強力にサポートする。
4. 4 セキュリティ機能
シーケンサCPUユニットとモーションCPUユニット共通のセキュリティ機能を搭載した。ソフトウェアキーをCPUユニットとパソコンに登録して保護するタイプと、CPUユニット内に格納したデータをファイル単位でパスワード登録してデータを保護するタイプの2種類を用意することによって目的に応じたセキュリティ機能を選択することができる。
さらにGX Works3とMT Works2とのセキュリティ機能でも同じ画面、同じ操作に統一している。
5. むすび
MELSEC Qシリーズから発展してきた当社独自のマルチCPUシステムは、1CPUユニットでシーケンス・モーション制御を行う他社のシステムに比べて負荷分散による高精度・高安定のモーション制御が可能であることが大きなメリットである。しかし一方で、プロセッサの高クロック化やマルチコアを生かした高速なコントローラも台頭してきているため、更なる高速化・高付加価値化によって応用範囲の拡大を目指していく必要がある。
グローバルに発達するモノづくりの高度化・効率化に対応し、シーケンサやサーボを始めとする当社FA製品の総合力を生かしていくために、サーボシステムコントローラはその中核をなす制御機器となりつつある。今後もサーボシステムコントローラのたゆまぬ発展を主導していく所存である。
製品紹介

想像を超えた装置革新をその手に。
単独スペックでは語りきれない、生産性への最大化ソリューションを実現するサーボシステムコントローラをラインアップ。
- 要旨 MELSEC iQ-Rシリーズサーボシステムコントローラ
- 第1回 ハードウェア
- 第2回 ソフトウェア
- 第3回 エンジニアリングソフトウェア