特集論文

産業用ロボット “MELFA FRシリーズ”
2017年6月公開【全3回】
名古屋製作所 宮本昌和
[第1回]製品特長(上)基本性能向上・SLMP対応
1. まえがき
社会環境の変化に伴う顧客ニーズの多様化によって、少品種大量生産から多品種少量生産や変種変量生産に移行しつつある。これらに対応するために、多くの製造現場では人によるセル生産が導入されている。しかし、人手不足や人件費の高騰、ヒューマンエラーによる品質のばらつき等の理由で、ロボットによるセル生産への要求が高まっており、組立て等の高度な作業の自動化が求められている。
さらに、近年はIoTの活用や人とロボットが同じエリアで作業をする人協働作業を活用した柔軟な生産ラインの実現も求められている。
今回、これらの市場要求に応えるためにロボットの基本性能向上、e-F@ctory/FA機器との連携強化、安全機能の強化、そして知能化技術を更に進化させた産業用ロボットMELFA FRシリーズを開発した。
本稿では、このMELFA FRシリーズの主な特長について述べる。
2. MELFA FRシリーズの特長
MELFA FRシリーズ(以下 “FRシリーズ” という。)の特長について述べる。
2. 1 基本性能向上
2. 1. 1 制御周期・通信周期の高速化
コントローラ性能を向上させ、制御周期を従来比1/2としたことによって軌跡精度を向上させた。また、MELSEC iQ-Rシリーズに対応したロボット用CPUを開発し、システムバス性能の向上によって通信速度を従来比4倍とし、生産設備のタクトタイム短縮を可能にした。
2. 1. 2 絶対位置精度向上
ロボットアームはモータの熱によって伸縮するため、同一位置への指令を行った場合でも、電源投入直後と暖機運転後で位置誤差が生じる場合がある。特に精度を要求される作業では、ロボットアームの温度を一定とするために本稼働前の暖機運転を推奨していた。
FRシリーズでは、ロボットアームの温度を計測し、熱膨張による位置誤差を自動補正する機能を搭載した(図1)。これによって、熱膨張による位置誤差を従来比約1/5に抑制し、暖機運転せずに電源投入直後から高精度な動作を可能とした。また、季節や時間帯によって気温が変動しても位置ズレを抑制できる。
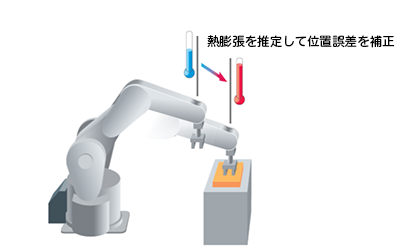
図1.ロボットアームの位置誤差補正
2. 2 e-F@ctory/FA機器との連携強化
ロボット内部情報を三菱電機のe-F@ctoryの情報系上位システムやFA機器が取得し、指示情報をロボットが受け取る手段として、次の機能を搭載した。
2. 2. 1 シーケンサデバイス割り付け機能
従来、ロボットの現在位置や電流値などロボットシステムであらかじめ決められた情報だけがロボットコントローラ内のデバイスに割り付けられていた。GOT(Graphic Operation Terminal)などのFA機器からはデバイスを介してこれらのロボットシステム情報にアクセスしていた。一方、各FA機器からロボットプログラム中の生産数や品質情報といった任意のユーザー情報にアクセスする場合には、ロボットプログラムによってデバイスにこれらの情報を書き込む必要があった。
FRシリーズでは、デバイスにプログラム内の変数(任意のユーザー情報を格納)を直接割り付けることを可能とした(図2)。これによって、ロボットと各FA機器との情報共有を容易にした。
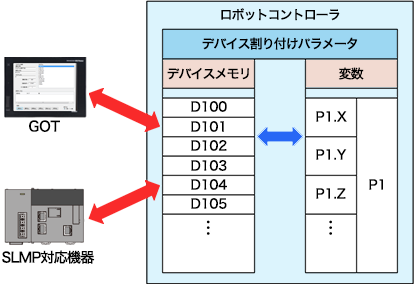
図2.シーケンサデバイス割り付け機能
2. 2. 2 SLMP対応
上位システムから下位システムを含むネットワークの階層・境界を意識しないアプリケーション間通信を可能にするSLMPに対応した(図3)。シーケンサデバイス割り付け機能を組み合わせると、上位システムである情報系とシームレスにロボット内部情報やロボットへの指示情報のやり取りが可能となる。
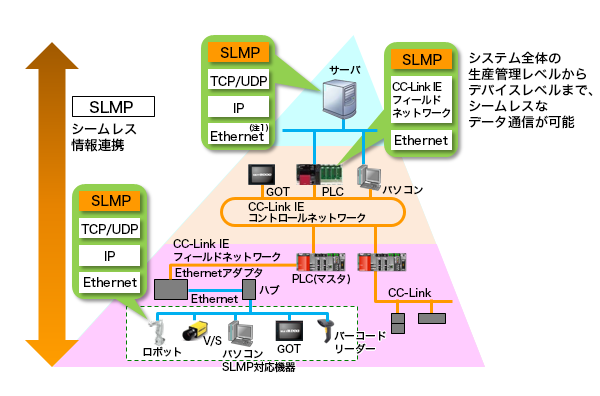
図3.SLMP
- (注1) Ethernetは、富士ゼロックス(株)の登録商標である。
- TCP : Transmission Control Protocol, UDP : User Datagram Protocol, IP : Internet Protocol, PLC : Programmable Logic Controller, V/S : Vision Sensor
- 要旨 産業用ロボット “MELFA FRシリーズ”
- 第1回 製品特長(上)基本性能向上・SLMP対応
- 第2回 製品特長(中)安全機能の強化
- 第3回 製品特長(下)知能化技術の強化