特集論文

産業用ロボット “MELFA FRシリーズ”
2017年6月公開【全3回】
名古屋製作所 宮本昌和
[第2回]製品特長(中)安全機能の強化
2. 3 安全機能の強化
人とロボットが同じエリアで作業をする人協働作業が求められている。それを実現するためには安全機能を備えたロボットとシステム運用に当たってのリスクアセスメントが必須となる。FRシリーズは、最新の安全規格(EN61800-5-2、IEC60204-1)で定められた安全停止監視(SOS)、安全停止2(SS2)を追加し、安全速度監視(SLS)と安全制限位置監視(SLP)の機能強化も行った。前シリーズである“Fシリーズ”(1)との安全機能比較を表1に示す。
次に、安全速度監視と安全制限位置監視の機能強化内容について述べる。

表1.安全機能比較
2. 3. 1 安全速度監視の機能強化
(1) 安全速度監視対象の拡張
ロボットには、手先の速度が遅くとも各関節が速く動作する姿勢が存在し、かつ各関節の動作経路を即座に予見することは困難である。そのため、手先以外の速度を監視する必要があった。
FRシリーズでは、ロボットアームの手先に加えて自由な位置に4か所まで安全速度監視対象の指定を可能とした。安全速度監視対象の拡張によって、各関節などの予期せぬ高速動作を未然に防ぐことができ、より安全なシステムの構築が可能となる(図4)。
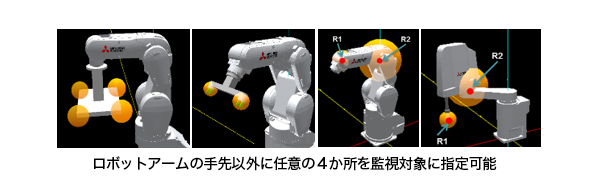
図4.安全速度監視対象の拡張
(2) XYZ軸方向ごとの安全速度監視
安全速度監視対象としてロボットアームの手先の合成速度だけしか指定できなかったため、速度を必要としない方向にも最高速を必要とする方向と同じだけ、安全が確保できる距離が必要であった。
FRシリーズでは、合成速度の速度監視に加え、XYZ軸方向ごとの速度監視を可能とした。これによって、作業者がいる方向だけを監視対象とするといった自由度の高い設定ができるため、より省スペースな設備を構築できる(図5)。
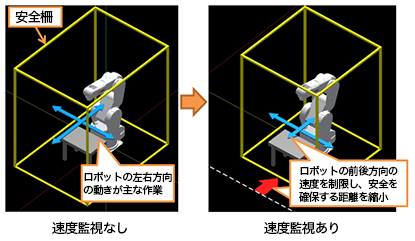
図5.XYZ軸方向ごとの安全速度監視
2. 3. 2 安全制限位置監視の機能強化
従来は、自由平面による侵入不可領域の指定だけであったため、ロボットセル内の周辺装置などに対する領域指定ができなかった。
新たに直方体のユーザー定義領域を侵入不可領域として指定して安全/非安全エリアの区分けがより簡単かつ柔軟に設定できるようにした(図6)。
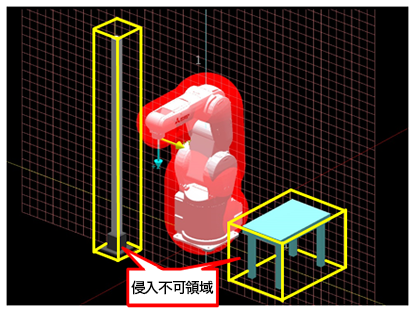
図6.安全制限位置監視対象の拡張
2. 3. 3 安全ロジック編集機能
ロボットコントローラ内で安全機能の作動条件(ロジック)を定義する安全信号のロジック編集機能を開発した(図7)。従来は、ロジックを設定するために安全シーケンサが必要であったが、ロボットの安全ロジック編集機能を活用することで、安全シーケンサがなくてもロジックの設定を可能とした。これによって、安全システムの構築・運用が容易になり、システムコストの削減や設計期間の短縮が可能となる。
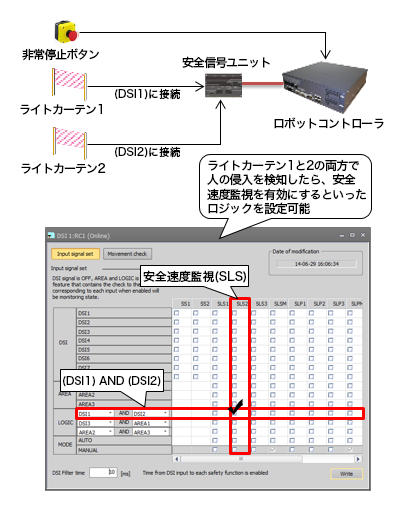
図7.安全ロジック編集画面
- 要旨 産業用ロボット “MELFA FRシリーズ”
- 第1回 製品特長(上)基本性能向上・SLMP対応
- 第2回 製品特長(中)安全機能の強化
- 第3回 製品特長(下)知能化技術の強化