特集論文

アプリケーションパッケージ
“iQ Monozukuri HANDLING”
2018年10月公開【全3回】
名古屋製作所 葉石敦生 服部真充 松田辰啓 藤本陽太郎
第1回 製品の特長(上)
1. まえがき
電子部品製造や包装分野での装置間搬送用途で、ロボットを使用するケースが増えている。このような用途では、コストや寸法の自由度、装置との連携などの観点から、ロボット機構を内製化し、モーションコントローラ等の汎用コントローラでシステムを構築したいという要求がある。しかし、独自にロボットシステムを開発する場合は、アーム先端座標を関節軸の角度に変換する座標変換が必要になシステム構築は容易ではない。
このようなユーザーに向け、モーションコントローラでロボットシステムを制御するためのアプリケーションパッケージiQ Monozukuri HANDLINGを開発した。
本稿では、このアプリケーションパッケージのソフトウェア構成及び各ソフトウェアの特長と技術について述べる。
2. iQ Monozukuri HANDLINGのソフトウェア構成
当社モーションコントローラはロボットシステムを制御するマシン制御機能を持つが、iQ Monozukuri HANDLINGを使用すると、先に述べたようなハンドリング用途のロボットシステムがより簡単に構築可能となる。
iQ Monozukuri HANDLINGに搭載されているソフトウェアは次のとおりである。
- (1) マシン制御アドオンライブラリ
モーションコントローラが持つマシン制御機能を活用した、ハンドリング用途で使用される代表的な8種類のロボット機構別のアドオンライブラリである。モーションコントローラの機能を追加するライブラリであり、モーションコントローラにインストールして使用する。 - (2) アプリケーションプログラム例
マシンJOG運転やティーチングなど、立ち上げに必要な機能のプログラム例である。 - (3) プログラミング支援ツール
移動経路の追加など、プログラム例を拡張する場合のプログラミングを支援するツールである。 - (4) マシン制御シミュレータ
実機レスでロボット制御のプログラムをシミュレーションでき、装置の製作前でもデバッグが可能である。
3章から6章で、これら五つのソフトウェアの特長と技術について述べる。
3. マシン制御アドオンライブラリ
3.1 マシン制御機能
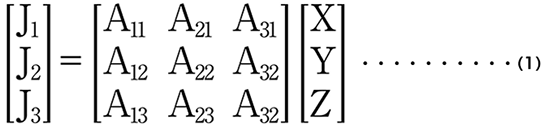
マシン制御機能は、モーションコントローラで、次のような行列計算を用い、ロボットアーム先端のXYZ座標データを各関節に搭載されたサーボモータの回転座標に座標変換し、ロボット機構を制御する機能である。
1マシン当たり最大4軸の構成軸をマシン制御用軸として管理し、マシン制御によるロボット機構の制御と、マシン制御機能を使わない周辺装置の制御を、1システムで実現できる。
3.2 マシン制御アドオンライブラリ
先に述べた座標変換式をユーザープログラムで作成した場合、コントローラ内のユーザープログラム容量を消費してしまう。またロボット機構が変わるたびにユーザーで変換式も変更する必要があり煩雑なことから、座標変換式をアドオンライブラリとして提供する。
マシン制御アドオンライブラリ(図1)は直交型、関節型など8種類のロボット機構に対応し、ユーザーは使用する機構に合わせてアドオンライブラリを選定し、モーションコントローラへ追加インストールする。マシン制御機能は、ユーザープログラムで設定したXYZ座標系の目標値や移動量を、ライブラリごとの座標変換式に基づいて変換し各関節のサーボモータ角度として指令を出力する。マシン制御アドオンライブラリによって座標変換をモーションOS内で処理するため、ユーザーは座標変換式を意識することなく、ロボット制御のプログラミングができる。
1台のモーションコントローラで最大8マシンの制御が可能であり、アーム長や可動範囲などのロボット機構の仕様を装置に合わせてユーザーで調整でき、より柔軟なシステム構築が可能である。
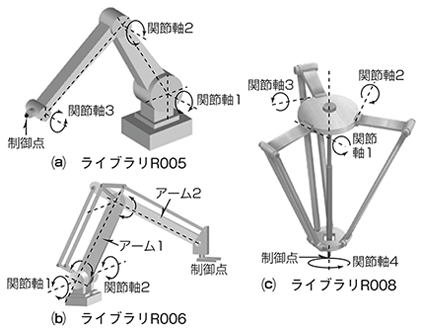
図1.マシン制御アドオンライブラリ例
- 要旨
- 第1回 製品の特長(上)
- 第2回 製品の特長(中)
- 第3回 製品の特長(下)