特集論文

アプリケーションパッケージ
“iQ Monozukuri HANDLING”
2018年10月公開【全3回】
名古屋製作所 葉石敦生 服部真充 松田辰啓 藤本陽太郎
第2回 製品の特長(中)
4. アプリケーションプログラム例
アドオンライブラリを実行するには、モーションコントローラから対象のライブラリをコールし、さらに装置に応じてアプリケーションプログラム例の逐次座標指令制御や近傍通過機能と、マシン制御アドオンライブラリとを組み合わせたプログラムを作成する必要がある。
アプリケーションプログラム例としては、そのほかに必要なマシンJOG運転、移動経路の代表点を登録するティーチング、移動経路の詳細設定をするモーションSFCプログラム例と、各種GOT画面例も用意し、ユーザープログラム開発容易化を実現する。
これらプログラム例や画面例をそのまま使用することだけでなく、考え方を参考にユーザーが流用開発することも可能である。
4. 1 逐次座標指令制御のプログラム例
コンベヤ上を移動中のワークをつかむロボットの場合、指定した座標ポイントへ制御点を追従させる逐次座標指令制御に、コンベヤの同期エンコーダのデータを入力することでロボットアームの同期を実現する(図2)。
4. 2 近傍通過機能のプログラム例
マシン制御で、二つ以上の補間動作を連続して行う場合に、近傍通過機能(図3)を使用して、補間動作間のつながりを円滑に行うことができる。制御点の移動軌跡を短縮できるためタクトタイムを短縮できるほか、カーブ軌跡を設定する必要がないため、ユーザープログラムを簡略化できる。
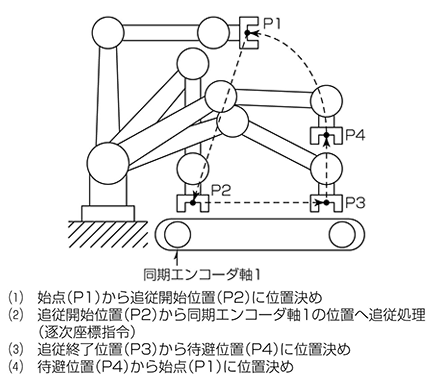
図2.逐次座標指令制御の動作例
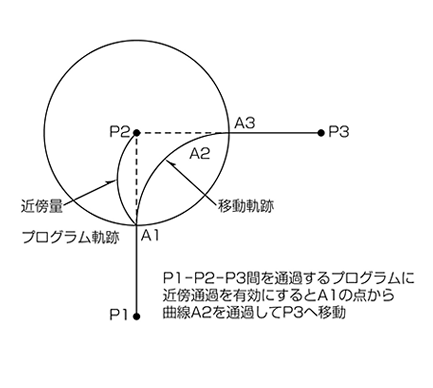
図3.近傍通過機能
4. 3 GOT画面例
近傍通過機能等のプログラミングに必要な画面例や、ティーチング等のロボット・サーボ調整に必要な画面例もアプリケーションプログラム例として用意している(図4、図5)。
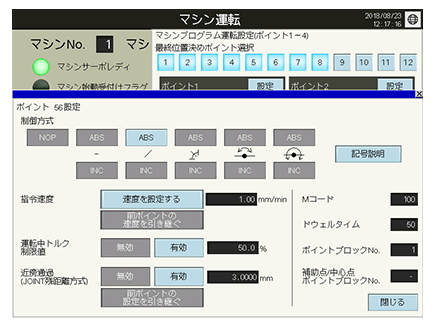
図4.移動経路設定画面例
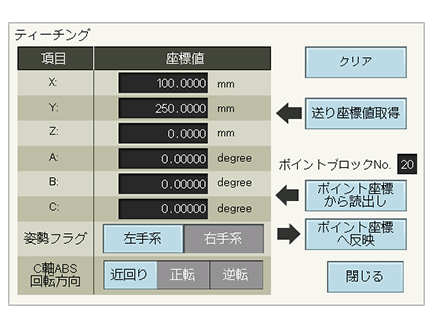
図5.ティーチング画面例
5. プログラミング支援ツール
4章で述べたモーションSFCプログラム例を使用することで簡単にロボットシステムを制御できるが、位置決め点数が多くなる場合にはプログラムの変更が必要となる。特に移動経路が複雑な場合は、モーションSFCプログラム例のソースコードだけでは多数の移動座標・移動経路を管理することが難しくなる。
そこで、このアプリケーションパッケージではプログラミング支援ツール(図6)を提供する。このツールはExcel(注1)のマクロ機能を使用し、Excel表に記載した移動座標から、対応するデバイスの先頭アドレスを指定するだけで、モーションSFCプログラムのソースコードを生成するものである。これによって、ロボット制御のためのプログラミング工数を、大幅に削減できる。
(注1) Excelは、Microsoft Corp.の登録商標である。
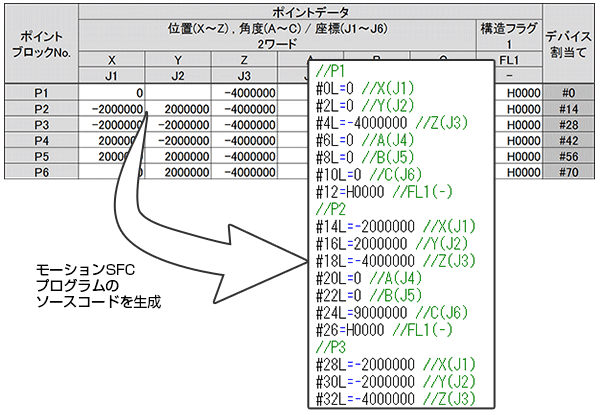
図6.プログラミング支援ツール
- 要旨
- 第1回 製品の特長(上)
- 第2回 製品の特長(中)
- 第3回 製品の特長(下)