特集論文

アプリケーションパッケージ
“iQ Monozukuri HANDLING”
2018年10月公開【全3回】
名古屋製作所 葉石敦生 服部真充 松田辰啓 藤本陽太郎
第3回 製品の特長(下)
6. マシン制御シミュレータ
近年、装置を組み上げる前に、システム設計者が制御プログラムを作成して動作確認することで、装置開発や立ち上げ調整に必要な時間を短縮する要求が高まっている。また、安全のため、ロボットの据付け前にアームの動作がどのようになっているかを事前に確認したいという要求もある。そのため、従来可能であったモーションコントローラ標準動作のシミュレーションに加えて、マシン制御機能に関するシミュレータ、及びロボットの姿勢を可視化する姿勢モニタツールを開発した(図7)。
姿勢モニタツールでは、制御に用いるアーム長パラメータを参照することでロボットのグラフィックを変更し、設定の手間なく、実機に近い形でのモニタリングを可能とした。
これらによって、ロボットの実機組立て前にロボットを含むシステム全体のプログラム動作確認を可能とし、立ち上げ工数の削減と安全性の確保を図ることができる。
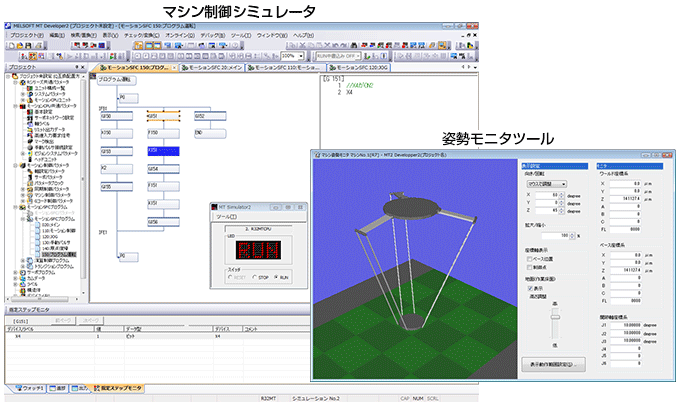
図7.マシン制御シミュレータ
7. むすび
アプリケーションパッケージiQ Monozukuri HANDLINGのソフトウェア構成及び各ソフトウェアの特長と技術について述べた。モーションコントローラ1台で制御することによってシステムコストの低減が期待でき、ロボットシステムを含めた装置全体の同期も容易になる。また、支援ツールによって装置設計や立ち上げ時間の短縮を図ることができる。
製品紹介

FAアプリケーションパッケージ iQ Monozukuri HANDLING![]()
座標変換が必要な搬送機構の立上げを強力サポート
iQ Monozukuri HANDLINGが立上げ時間の短縮、開発の容易化を実現!
- 要旨
- 第1回 製品の特長(上)
- 第2回 製品の特長(中)
- 第3回 製品の特長(下)