MELSERVO-J4シリーズ対応 サーボモータ 回転型サーボモータ仕様の注釈について

回転型サーボモータ仕様の注釈について
●電源設備容量
- 電源設備容量は電源インピーダンスにより変わります。
- 記載の値はサーボモータ1台あたりに必要な電源設備容量です。多軸サーボアンプの電源設備容量は次の式で算出してください。
電源設備容量 [kVA] = 接続するサーボモータ電源設備容量 [kVA] の合計値
●電源設備容量(HG-AKシリーズの場合)
- 電源設備容量はご使用のDC電源および配線のインピーダンスにより変わります。
- 記載の値はサーボモータ1台あたりに必要な電源設備容量です。多軸サーボアンプの電源設備容量は次の式で算出してください。
電源設備容量 [W] = 接続するサーボモータ電源設備容量 [W] の合計値
●回生ブレーキ頻度
- 回生ブレーキ頻度はサーボモータ単体、回生オプションなしで定格回転速度から減速停止する場合の許容頻度を示します。ただし、負荷をつけた場合、表の値の1/(m + 1) になります(m = 負荷慣性モーメント/サーボモータ慣性モーメント)。
また、定格回転速度を超える場合、回生ブレーキ頻度は (運転回転速度/定格回転速度) の2乗に反比例します。運転時の回生電力 [W] が許容回生電力 [W] を超えないようにしてください。運転速度が頻繁に変わる場合や、上下送りのように常時回生状態となるような場合は、特に注意してください。
各システムにより最適な回生オプションが異なりますので、ドライブシステム容量選定ソフトウェアMotorizerを使用し、最適な回生オプションを選定してください。回生オプションの許容回生電力については、「 回生オプション 」を参照してください。
●環境条件
- 常時オイルミストや油水がかかる環境では、標準仕様のサーボモータは使用できない場合があります。詳細については、営業窓口にお問合せください。
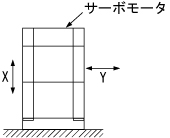
●環境条件 耐振動
- 振動方向は下図のとおりです。数値は最大値を示す部分 (通常反負荷側ブラケット) の値です。
サーボモータ停止時は、ベアリングにフレッティングが発生しやすくなりますので、振動を許容値の半分程度に抑えてください。
●軸の許容荷重
- 軸の許容荷重については、下図を参照してください。軸には表中の値を超える荷重がかからないようにしてください。表中の値はそれぞれ単独で作用した場合です。

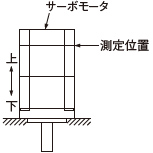
●振動階級
- V10とは、サーボモータ単体での振幅が10 μm以下であることを示します。測定時のサーボモータ取付け姿勢および測定位置を下図に示します。
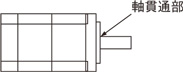
●構造 軸貫通部
- 軸貫通部については、下図を参照してください。
減速機付きサーボモータ仕様の注釈について
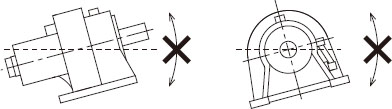
●取付け方法
下記のモータについては、軸方向および軸回転方向に傾ける取付け方法は不可です。
- HG-SR102(4)(B)G1/G1H 1/43, 1/59
- HG-SR152(4)(B)G1/G1H 1/29, 1/35, 1/43, 1/59
- HG-SR202(4)(B)G1/G1H 1/29, 1/35, 1/43, 1/59
- HG-SR352(4)(B)G1/G1H 全減速比
- HG-SR502(4)(B)G1/G1H 全減速比
- HG-SR702(4)(B)G1/G1H 全減速比