特集論文

三菱電機産業ロボット用力覚制御システム
2013年4月公開【全4回】 2013年6月公開【全4回】
名古屋製作所 藤島光城 村田健二
第1回 ロボット用力覚制御システムの機能と制御方法(上)
1. まえがき
モノづくりの現場ではグローバル競争に対応するための次世代生産システムとして産業用ロボットの活用が進んできている。その背景として、(1)工場の安定的な労働力確保のための自動化推進、(2)消費者嗜好(しこう)の多様化による多品種生産に適応したセル生産システムへの移行、(3)安価にかつ短期間で設計、稼働できる生産システムへの要求、(4)高精細組立て、柔軟物搬送、高速ハンドリング等の高度な作業の自動化要求が挙げられる。
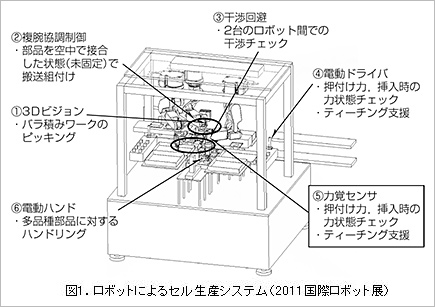
しかし、この高度な作業の自動化は難しく、力覚センサやビジョンセンサ等の各種センサを活用した知能化システムを構築する必要がある。三菱電機ではこの要求にこたえるため、知能化機能を搭載したロボットによるサーマルリレーの組立てを自動で行うセル生産システムを開発した(図1)。
本稿では、この知能化システムの中でも重要な力覚制御システムの機能と制御、及びロボットへの適用例を述べる。
2. ロボット用力覚制御システムの機能と制御方法
2.1 力覚機能
力覚機能は6自由度の力覚センサ情報を用いて、ロボットに力の感覚を持たせる機能である。今までロボットでは難しかった微小な力加減・力検知を必要とする高度な作業や、教示の省力化を実現できる。以下に主な特長を示す。
- ロボットを柔らかく制御し、対象ワークに倣いながら動作できるため、精度が要求される機械部品の嵌め合い作業が容易になる。
- 任意の方向に一定の力で押し付けながら動作できるので、ロボットによるバフ掛けや研磨作業ができる。
- ロボットの動作途中にロボットの柔らかさや接触検知条件を変更できるため、ピン挿入時に柔らかさを変更し、挿入初期はワーク表面を傷つけないように柔らかく制御、挿し込み時は堅く制御してしっかり挿入できる。
- 接触状態を検知し割り込み信号を発生させ、ロボットの動作を変更できるため、ワークを傷つける力を検知したら移動方向を変えるなど、エラー・リカバリー用途に使える。
- 接触時の位置情報や力情報を取得できるため、接触による高い精度の位置検出が行える。また、教示作業で見えづらいワークとロボットハンドの接触状態の確認ができるため、教示作業の省力化が行える。
- 位置データに同期した力データをログデータとして保存し、パソコンのロボット用ソフトウェア“RT ToolBox2”で簡単にグラフ表示できるのでエラー発生時の解析に役立つ。
- ログデータをFTP(File Transfer Protocol)経由でパソコンに自動転送してデータベースに蓄積し、組立て品質を後からトレースできる。
- センサに設定以上の力が検出された異常時に、ロボット動作を停止し、ワークや力覚センサを保護できる。
製品紹介

- 要旨 三菱電機産業ロボット用力覚制御システム
- 第1回 ロボット用力覚制御システムの機能と制御方法(上)
- 第2回 ロボット用力覚制御システムの機能と制御方法(中)
- 第3回 ロボット用力覚制御システムの機能と制御方法(下)
- 第4回 力覚制御システムの適用事例